Ajustar Mode of Operation "Profile Position" (pp)
Con este mode of operation se puede posicionar de modo relativo o absoluto. El perfil de posición es calculado por el generador de perfiles del variador.
La velocidad se indica en inc s-1, la aceleración y la deceleración se indican en inc s-2.
La imagen siguiente muestra una conversión de los valores:
Magnitud | Valor | ||
|---|---|---|---|
Velocidad | 1800 min-1 | 30 s-1 | 1966080 inc s-1 |
Deceleración/aceleración | 2 s | 15 s-2 | 983040 inc s-2 |
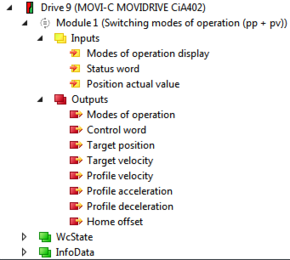
La siguiente tabla muestra los objetos CiA402 necesarios o recomendados para el mode of operation. No es obligatorio que los objetos estén en la imagen cíclica PDO.
Tenga en cuenta el número máximo de 8 entradas en la imagen PDO cíclica (véase Adaptar imagen PDO).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Positioning option code |
| ||
Target position | Position actual value | ||
Profile Velocity | Velocity actual value | ||
Profile Acceleration | |||
Profile Deceleration | Following error actual value (recommended) | ||
Following error window |
| ||
Following error timeout | |||
Proceda como se indica a continuación:
- Usted ha puesto en marcha exitosamente el motor.
- Usted ha integrado el variador mediante escaneo de red u offline del catálogo de unidades en el proyecto TwinCAT, lo ha vinculado con un eje Motion (véase Motion Axis: Integración de variador) y ha aceptado el objeto de datos de proceso correspondiente en la imagen PDO (Adaptar imagen PDO).
- Ya ha referenciado el accionamiento. Si la referenciación (homing) ha sido ejecutada exitosamente, se señaliza en la palabra de estado (objeto de datos de proceso "Status word") el bit "Homing attained".
- Si desea adaptar manualmente la interfaz PDO, ajuste los objetos de datos de proceso necesarios.
- Los objetos de datos de proceso en las dos primeras áreas constituyen la configuración mínima de la interfaz PDO. Se pueden cambiar durante el funcionamiento los valores de perfil para velocidad, aceleración y deceleración.
- Si desea utilizar el módulo predefinido "Switching modes of operation (pp+pv)", seleccione el módulo funcionalmente fijo en la pestaña "Slots" (véase Motion Axis: Integración de variador).
- Por regla general, este mode of operation se utiliza sin eje Motion. Ajuste los valores de perfil directamente a través de la interfaz PDO.
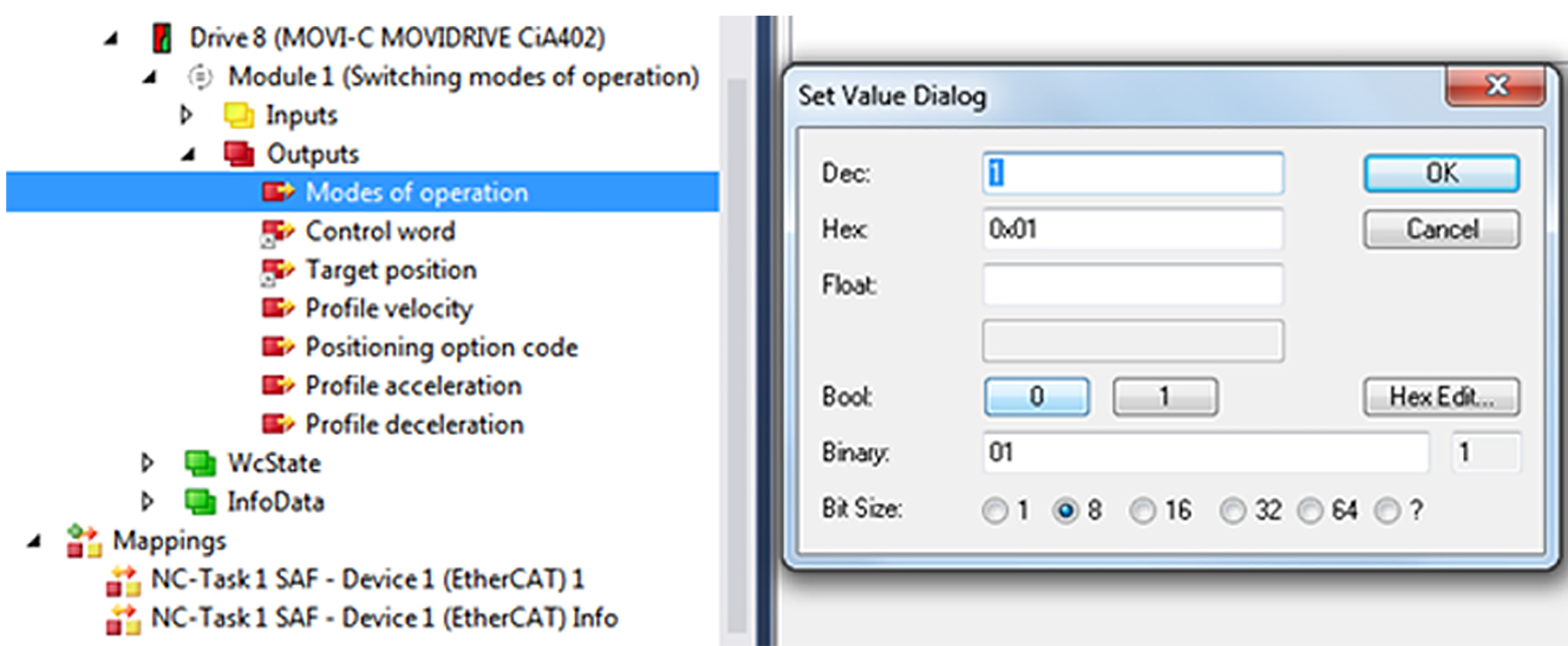
- Ajuste en el objeto de datos de proceso "Modes of operation" pp. Introduzca para este fin el valor "1" en la ventana del editor.
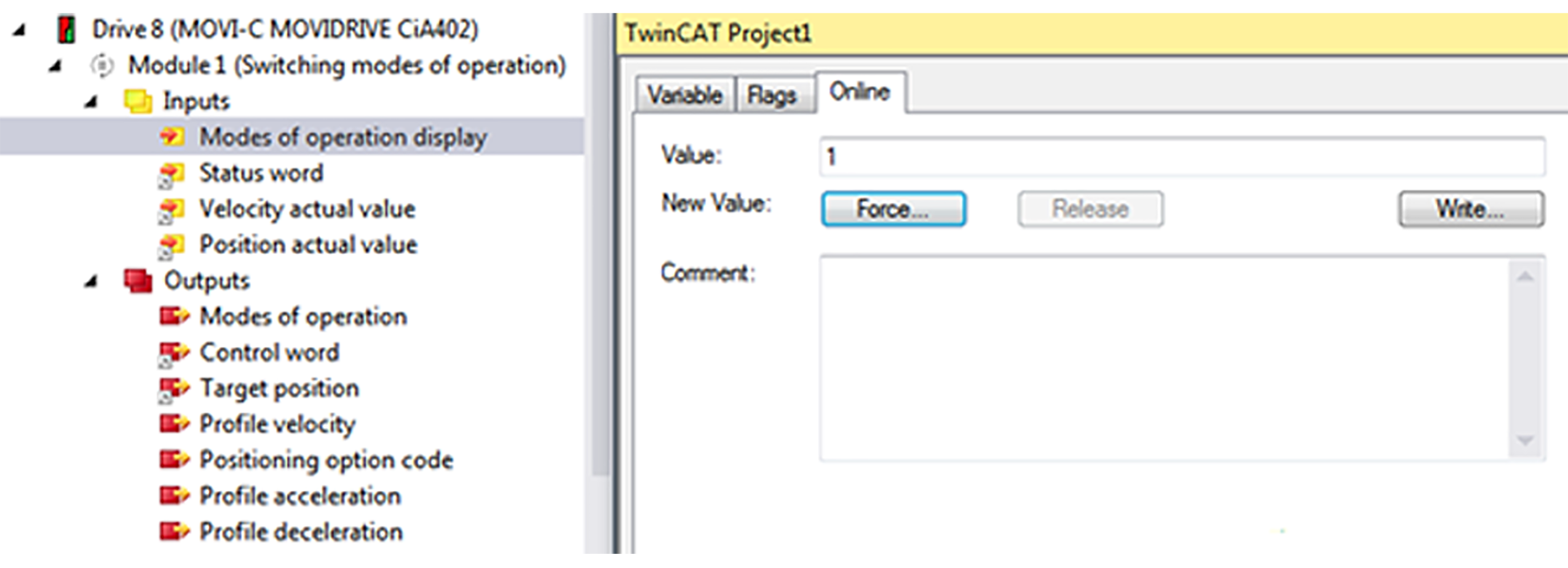
- En el objeto de datos de proceso "Modes of operation display" se señaliza el valor "1".
- En el elemento de display del variador se muestra el valor "24".
- Si el posicionamiento ha sido ejecutado exitosamente, se señaliza en la palabra de estado (objeto de datos de proceso "Status word") el bit "Targed reached".
- Para aceptar una nueva posición, es necesario un flanco ascendente en el bit 4 de la palabra de control (objeto de datos de proceso "Control word").
- Ajuste mediante el objeto de datos de proceso "Position option code" el tipo de posicionamiento. Este ajuste solo está activado si los bits de control 5 y 6 de la palabra de control están asignados correspondientemente.
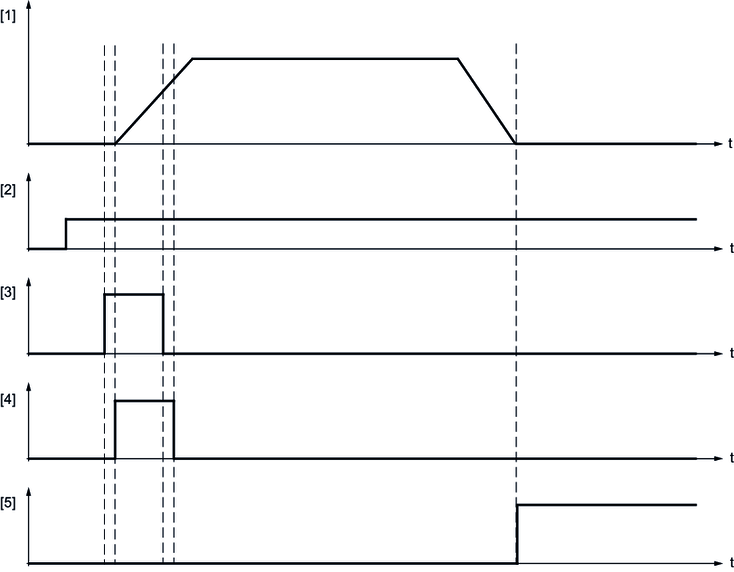
[1] | Velocidad real |
[2] | Consigna de posición de destino |
[3] | Palabra de control: Consigna nueva (bit 4) |
[4] | Palabra de control: Aceptación de consigna (bit 12) |
[5] | Palabra de estado: Posición de destino alcanzada (bit 10) |
Bit 6 | Bit 5 | Definición |
|---|---|---|
0 | 0 | Posicionamiento normal Comparable con el posicionamiento del eje lineal. Cuando se alcanzan los límites de posicionamiento "Min position range limit" (objeto 0x607B:2) y "Max position range limit" (objeto 0x607B:1), la consigna se ajusta automáticamente en el otro lado del límite. El posicionamiento puede ser tanto relativo como también absoluto. Un posicionamiento más allá de los valores límite de Modulo solo es posible con esta combinación de bits. |
0 | 1 | Posicionamiento solo en sentido de movimiento negativo Si la posición de consigna es superior a la posición real, el accionamiento se mueve pasando por el límite de posicionamiento "Min position limit" (objeto 0x607B:1) a la posición de consigna. |
1 | 0 | Posicionamiento solo en sentido de movimiento positivo Si la posición de consigna es inferior a la posición real, el accionamiento se mueve pasando por el límite de posicionamiento "Max position limit" (objeto 0x607B:2) a la posición de consigna. |
1 | 1 | Posicionamiento por el recorrido más corto a la posición de consigna El sentido de giro del accionamiento se define de tal modo que al posicionar se produzca el recorrido más corto entre la posición real y la posición de consigna actual. NOTA: Cuando la distancia entre la posición real y la posición de consigna en un sistema de 360° es de 180°, el accionamiento se mueve en sentido positivo. |
- Introduzca para este fin los siguientes valores en la ventana de editor del objeto de datos de proceso "Position option code".
Position option code | Valor |
|---|---|
Posicionamiento normal | 0 |
Solo en sentido negativo | 64 |
Solo en sentido positivo | 128 |
Recorrido más corto | 192 |
