设置操作模式“Profile Position” (pp)
该操作模式可用于进行相对或绝对定位。该位置曲线由变频器的曲线生成器进行计算。
速度的单位为inc s-1,加速度和减速度的单位为inc s-2。
下列示例显示了值的换算:
规格 | 数值 | ||
|---|---|---|---|
速度 | 1800 min-1 | 30 s-1 | 1966080 inc s-1 |
减速度/加速度 | 2 s | 15 s-2 | 983040 inc s-2 |
下表显示了操作模式所需或所推荐的CiA402对象。对象不一定必须位于循环PDO映像中。
注意循环PDO映像中8个条目的最大数量(参见调整PDO映像)。
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Positioning option code |
| ||
Target position | Position actual value | ||
Profile Velocity | Velocity actual value | ||
Profile Acceleration | |||
Profile Deceleration | Following error actual value (recommended) | ||
Following error window |
| ||
Following error timeout | |||
请按以下步骤进行操作:
- 如要手动调整PDO接口,应设置所需的过程数据对象。
- 前两个区域中的过程数据对象构成了PDO接口的最低配置。速度、加速度和减速度的配置文件值可以在运行期间进行更改。
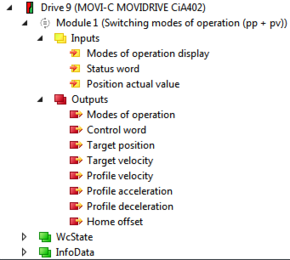
- 如要使用预定义模块“Switching modes of operation (pp+pv)”(切换操作模式 (pp+pv)),则在“Slots”(插槽)标签卡中选择功能固定的模块(参见运动轴:接入变频器)。
- 该操作模式通常在没有运动轴的情况下使用。直接通过PDO接口设置配置文件值。
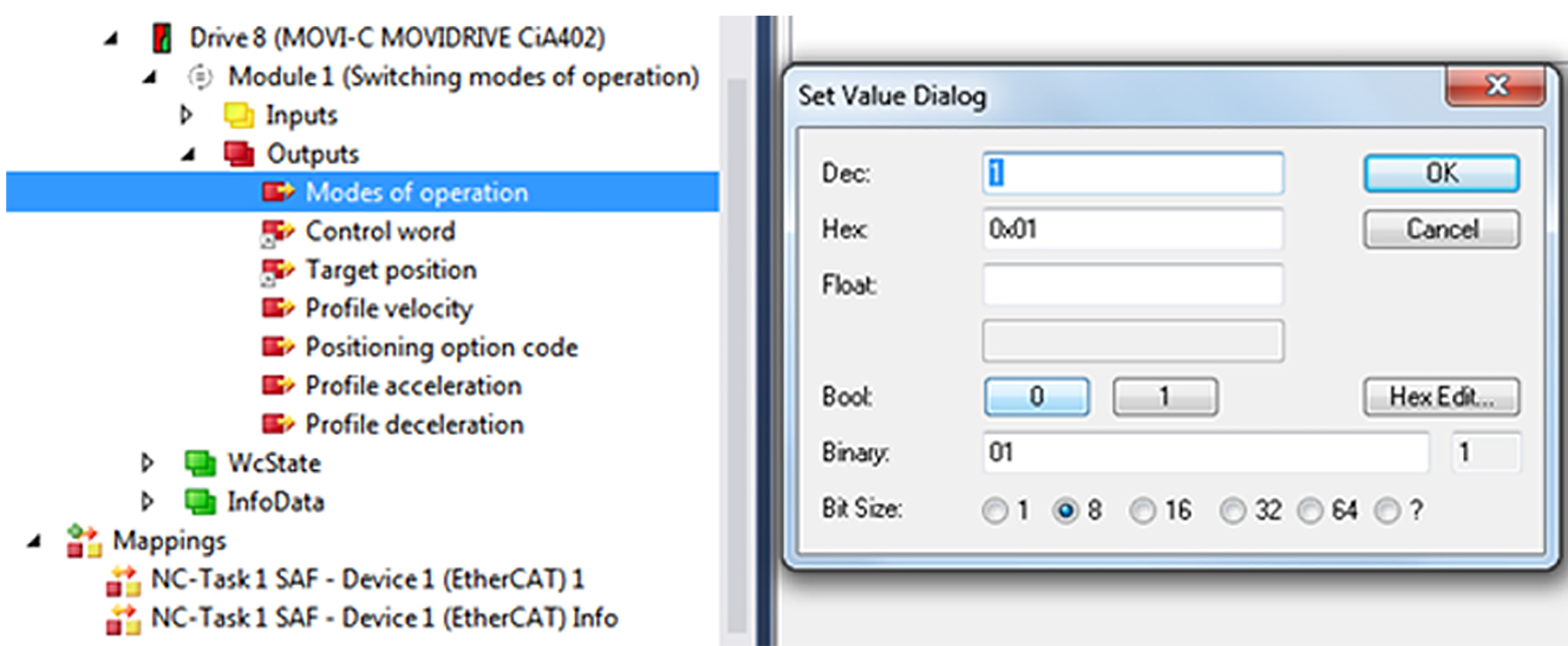
- 在过程数据对象“Modes of operation”(操作模式)中设置pp。为此,请在编辑器窗口中输入值“1”。
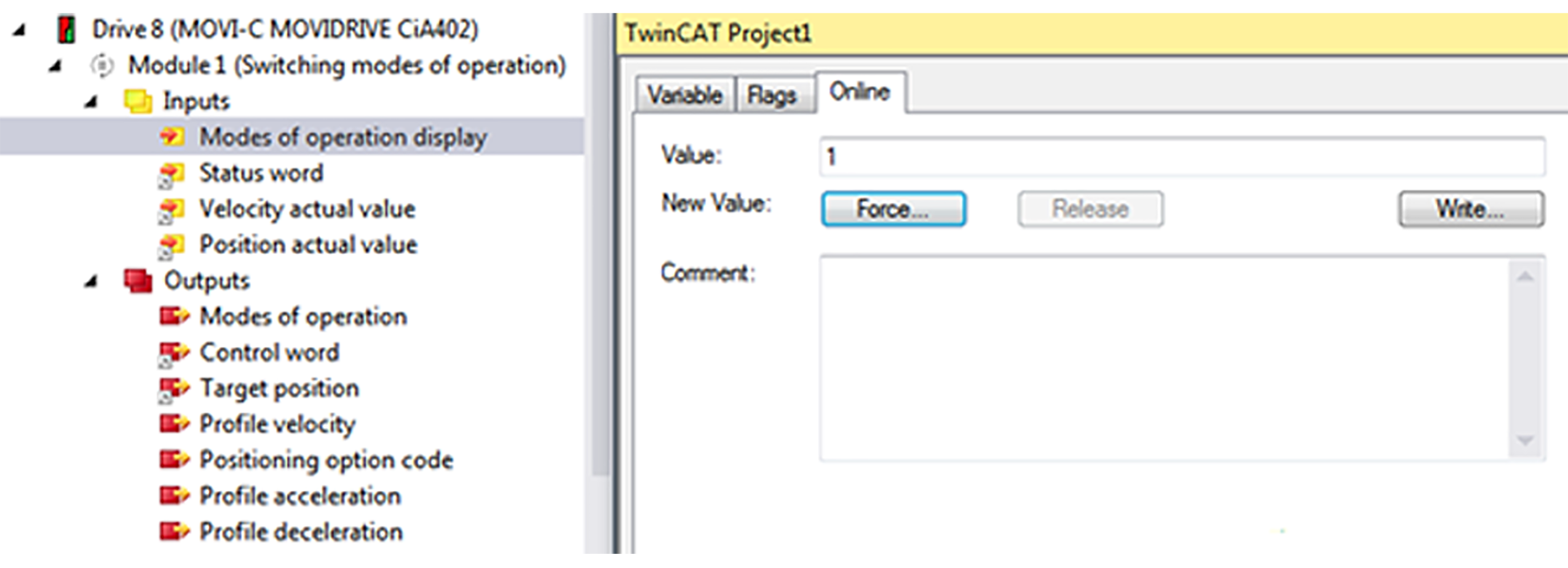
- 在过程数据对象“Modes of operation display”(操作模式显示)中报告值“1”。
- 变频器的显示元件显示值“24”。
- 如已成功执行定位,则会在状态字(过程数据对象“Status word”(状态字))中报告“Targed reached”(已达到目标)位。
- 如要应用新位置,需要控制字(过程数据对象“Control word”(控制字))位4处的上升沿。
- 通过过程数据对象“Position option code”(位置选项代码)设置定位类型。仅当相应分配控制字的控制位5和6时,此设置才激活。
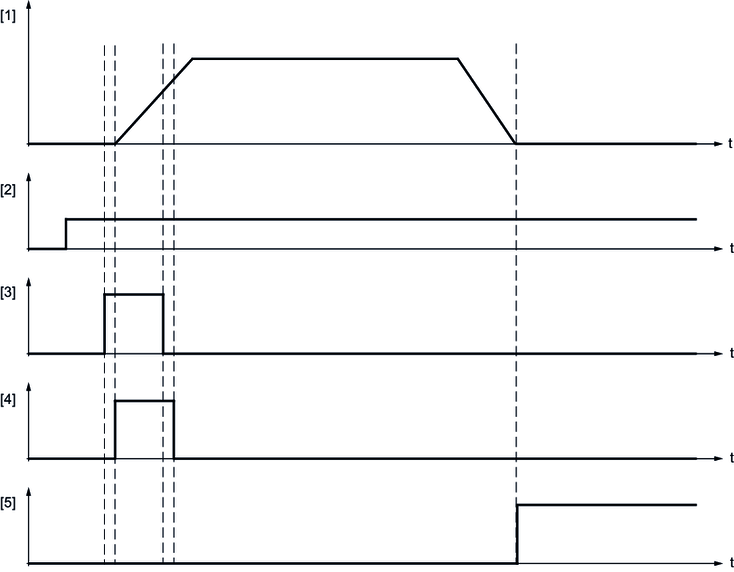
[1] | 实际速度 |
[2] | 目标位置设定值 |
[3] | 控制字:新设定值(位4) |
[4] | 控制字:设定值应用(位12) |
[5] | 状态字:已达到目标位置(位10) |
位6 | 位5 | 定义 |
|---|---|---|
0 | 0 | 标准定位 与线性轴的定位类似。当达到定位限制“Min position range limit”(最小位置范围限制)(对象0x607B:2)和“Max position range limit”(最大位置范围限制)(对象0x607B:1)时,设定值会自动调整为限制的另一侧。定位既可以是相对的,也可以是绝对的。超出模数极限值的定位只能通过该位组合来实现。 |
0 | 1 | 仅沿负运动方向定位 如果设定位置大于实际位置,驱动装置将越过“Min position limit”(最小位置限制)(对象0x607B:1)到达设定位置。 |
1 | 0 | 仅沿正运动方向定位 如果设定位置小于实际位置,驱动装置将越过“Max position limit”(最大位置限制)(对象0x607B:2)到达设定位置。 |
1 | 1 | 在到达设定位置的最短路径上定位 确定驱动装置的旋转方向,使得在定位时,实际位置与当前设定位置之间的路径最短。 提示:如果在360°系统中实际位置与设定位置之间的距离为180°,则驱动装置将沿正方向移动。 |
- 为此,在过程数据对象“Position option code”(位置选项代码)的编辑器窗口中输入以下值。
Position option code | 数值 |
|---|---|
标准定位 | 0 |
仅在负方向 | 64 |
仅在正方向 | 128 |
最短路径 | 192 |
