Réglage du Mode of operation "Profile Position" (pp)
Ce "Mode of operation" permet de réaliser un positionnement relatif ou absolu. Le profil de position est calculé par le générateur de profil du variateur de vitesse.
La vitesse est indiquée en inc s-1, l'accélération et la décélération sont indiquées en inc s-2.
L'exemple suivant montre une conversion des valeurs.
Taille | Valeur | ||
|---|---|---|---|
Vitesse | 1800 min-1 | 30 s-1 | 1966080 inc s-1 |
Décélération / accélération | 2 s | 15 s-2 | 983040 inc s-2 |
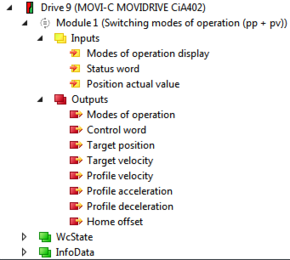
Le tableau suivant indique les objets CiA402 nécessaires ou recommandés pour le Mode of operation. Les objets ne doivent pas obligatoirement figurer dans la représentation PDO cyclique.
Tenir compte du nombre maximal de huit entrées dans la représentation PDO cyclique (voir Adaptation de la représentation PDO).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Control word | Status word | ||
Positioning option code |
| ||
Target position | Position actual value | ||
Profile Velocity | Velocity actual value | ||
Profile Acceleration | |||
Profile Deceleration | Following error actual value (recommended) | ||
Following error window |
| ||
Following error timeout | |||
Procéder comme suit.
- La mise en service du moteur a été effectuée correctement.
- Le variateur de vitesse a été intégré, depuis le catalogue d'appareils, dans le projet TwinCAT par scrutation réseau ou en mode hors ligne et connecté avec un axe Motion (voir Axe Motion : intégration du variateur de vitesse) ; l'objet données process correspondant a été transféré dans la représentation PDO (Adaptation de la représentation PDO).
- L'entraînement a déjà été référencé. Si le référencement (homing) a été effectué correctement, le bit "Homing attained" est retourné dans le mot d'état (objet données process "Status word").
- Pour adapter manuellement l'interface PDO, régler les objets données process nécessaires.
- Les objets données process des deux premiers blocs correspondent à la configuration minimale de l'interface PDO. Les valeurs de profil pour la vitesse, l'accélération et la décélération peuvent être modifiées en cours de fonctionnement.
- Pour utiliser le module prédéfini "Switching modes of operation (pp+pv)", sélectionner le module fonctionnel fixe dans l'onglet "Slots" (voir Axe Motion : intégration du variateur de vitesse).
- En règle générale, ce Mode of operation est utilisé sans axe Motion. Régler les valeurs de profil directement via l'interface PDO.
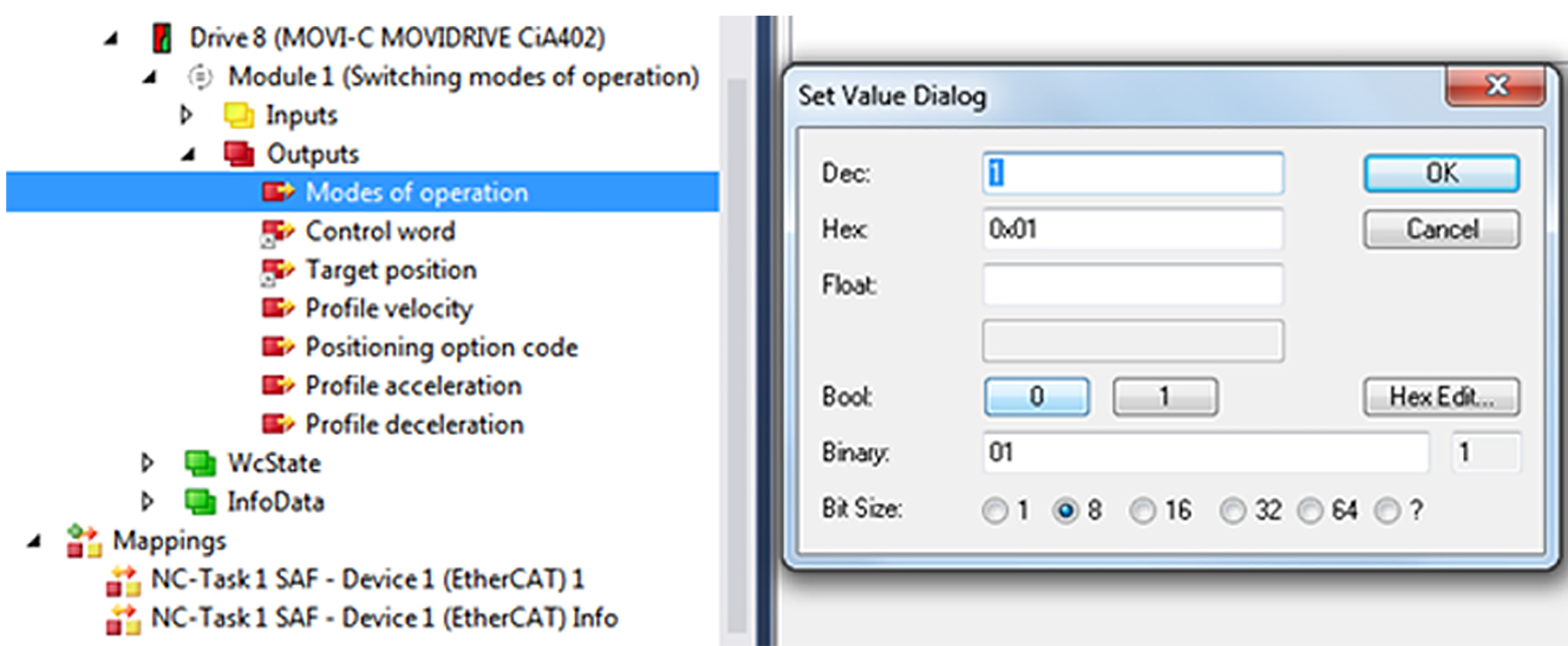
- Régler l'objet données process "Modes of operation" sur pp. Pour cela, régler la valeur "1" dans la fenêtre d'édition.
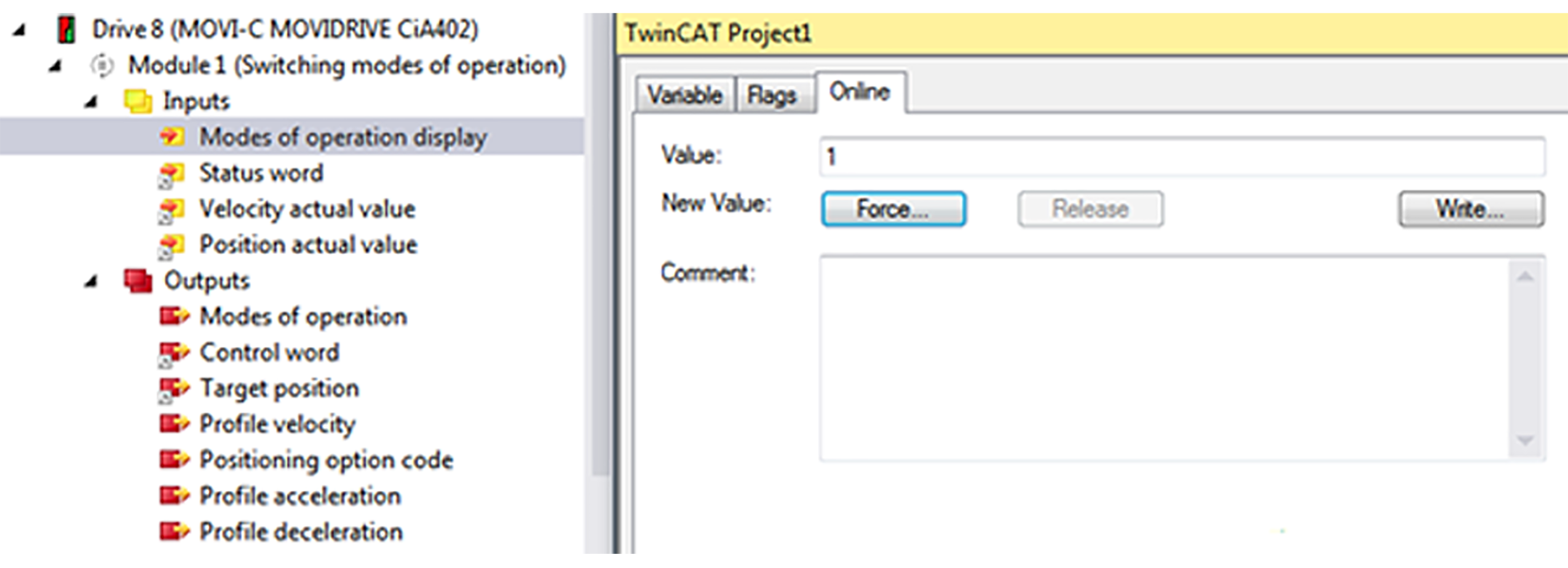
- La valeur "1" est retournée dans l'objet données process "Modes of operation display".
- La valeur "24" apparaît sur l'élément d'affichage du variateur de vitesse.
- Si le positionnement a été effectué correctement, le bit "Targed reached" est retourné dans le mot d'état (objet données process "Status word").
- Pour appliquer une nouvelle position, un front montant est nécessaire sur le bit 4 du mot de commande (objet données process "Control word").
- Régler le mode de positionnement via l'objet données process "Position option code". Ce réglage n'est actif que si les bits de commande 5 et 6 du mot de commande sont affectés en conséquence.
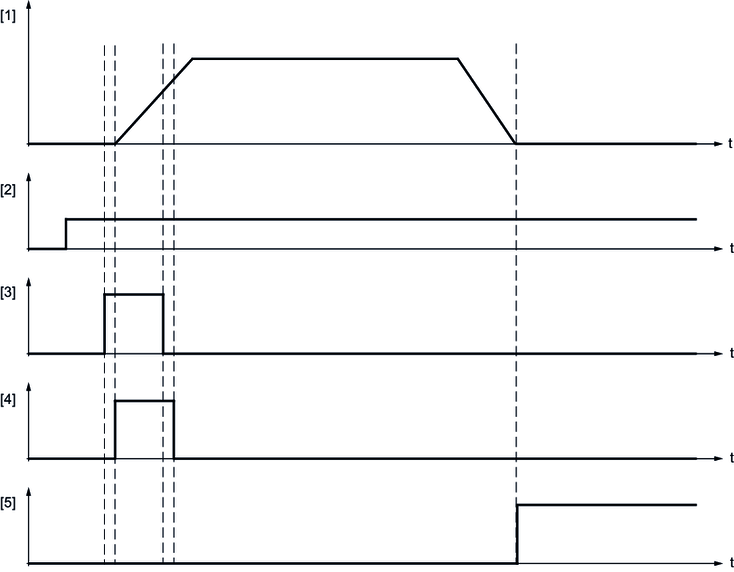
[1] | Vitesse réelle |
[2] | Consigne de position cible |
[3] | Mot de commande : nouvelle consigne (bit 4) |
[4] | Mot de commande : application de consigne (bit 12) |
[5] | Mot d'état : position cible atteinte (bit 10) |
Bit 6 | Bit 5 | Définition |
|---|---|---|
0 | 0 | Positionnement normal Comparable au positionnement de l'axe linéaire. Lorsque les limites de position "Min position range limit" (objet 0x607B:2) et "Max position range limit" (objet 0x607B:1) sont atteintes, la consigne se règle automatiquement sur l'autre extrémité de la limite. Le positionnement peut être aussi bien relatif qu'absolu. Un positionnement au-delà des valeurs modulo n'est possible qu'avec cette combinaison de bits. |
0 | 1 | Positionnement uniquement dans le sens de marche négatif Si la consigne de position est supérieure à la position réelle, l'entraînement se déplace au-delà de la limite de position "Min position limit" (objet 0x607B:1) jusqu'à la consigne de position. |
1 | 0 | Positionnement uniquement dans le sens de marche positif Si la consigne de position est inférieure à la position réelle, l'entraînement se déplace au-delà de la limite de position "Max position limit" (objet 0x607B:2) jusqu'à la consigne de position. |
1 | 1 | Positionnement sur la position de consigne via le chemin le plus court Le sens de rotation de l'entraînement est défini de sorte que lors du positionnement, le chemin le plus court soit entre la position réelle et la position de consigne actuelle. REMARQUE : l'entraînement se déplace dans le sens positif si l'écart entre la position réelle et la consigne de position est de 180° dans un système à 360°. |
- Pour cela, renseigner les valeurs suivantes dans la fenêtre d'édition de l'objet données process "Position option code".
Position option code | Valeur |
|---|---|
Positionnement normal | 0 |
Uniquement dans le sens négatif | 64 |
Uniquement dans le sens positif | 128 |
+ court chemin | 192 |
