设置操作模式“Cyclic Synchronous Torque” (cst)
驱动装置可提供指定的扭矩。由此产生的运动取决于现有的外部条件,例如反作用力矩或总惯性。如果外部负载持续低于驱动装置的当前扭矩,驱动装置将加速至电机的内部最大转速。因此,应对主站进行特定于应用的速度监控。
下表显示了操作模式所需或所推荐的CiA402对象。并非所有对象都必须位于循环PDO映像中。
注意循环PDO映像中8个条目的最大数量(参见调整PDO映像)。
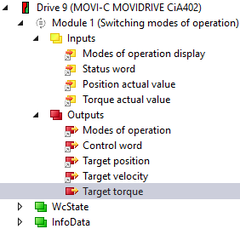
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Target torque | Torque actual value | ||
Torque offset | Position actual value | ||
Interpolation time period | Velocity actual value | ||
请按以下步骤进行操作:
- 设置距离 (mm)、角度 (°)、时间 (s) 等的参考单位。
- 设置所需要的用户单位。注意减速器传动比以及电机转数仍符合CiA402标准(216增量/转)。
- 设置运动动态。为此,输入最大速度和上升/下降斜坡。
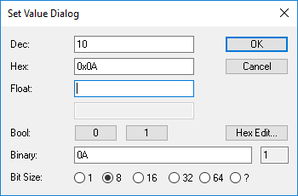
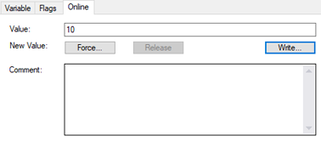
- 在过程数据对象“Modes of operation”(操作模式)中设置cst。为此,请在编辑器窗口中输入值“10”。
- 在过程数据对象“Modes of operation display”(操作模式显示)中报告值“10”。
- 变频器的显示元件显示值“17”。
- 在过程数据对象“Target torque”(目标扭矩)中设置扭矩设定值。以0.1 %电机设定扭矩指定额定扭矩。