Mode of Operation "Cyclic Synchronous Torque" (cst) einstellen
Der Antrieb stellt das vorgegebene Drehmoment. Die resultierende Bewegung hängt von den bestehenden äußeren Bedingungen ab, beispielsweise Gegenmoment oder Gesamtträgheit. Wenn die äußere Last dauerhaft geringer als das aktuelle Drehmoment des Antriebs ist, beschleunigt der Antrieb bis zur internen Maximaldrehzahl des Motors. Daher sollte der Master eine zur Anwendung geeignete Geschwindigkeitsüberwachung vornehmen.
Die folgende Tabelle zeigt die CiA402-Objekte, die für den mode of operation erforderlich sind oder empfohlen werden. Nicht alle Objekte müssen im zyklischen PDO-Abbild liegen.
Beachten Sie die maximale Anzahl von 8 Einträgen im zyklischen PDO-Abbild (siehe PDO-Abbild anpassen).
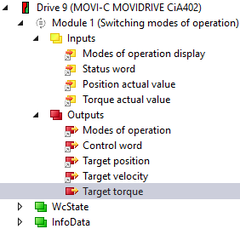
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Target torque | Torque actual value | ||
Torque offset | Position actual value | ||
Interpolation time period | Velocity actual value | ||
Gehen Sie folgendermaßen vor:
- Sie haben den Motor erfolgreich in Betrieb genommen.
- Sie haben den Umrichter durch Netzwerk-Scan oder offline aus dem Gerätekatalog in das TwinCAT-Projekt eingebunden, mit einer Motion-Achse verknüpft (siehe Motion Axis: Umrichter einbinden) und das entsprechende Prozessdatenobjekt in das PDO-Abbild übernommen (PDO-Abbild anpassen).
- Stellen Sie die Bezugseinheiten für die Entfernung (mm), Winkel (°), Zeit (s) usw. ein.
- Stellen Sie die gewünschten Anwendereinheiten ein. Achten Sie dabei auf die Getriebeübersetzung und, dass die Motorumdrehung CiA402‑konform (216 Inkremente/Umdrehung) bleibt.
- Stellen Sie den Bewegungsdynamik ein. Geben Sie dazu die Maximalgeschwindigkeit und die Rampen auf/ab an.
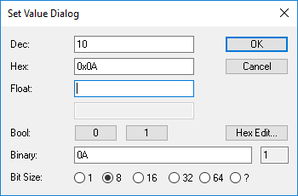
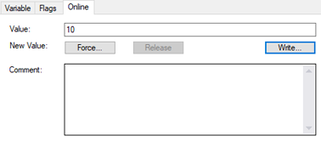
- Stellen Sie im Prozessdatenobjekt "Modes of operation" cst ein. Tragen Sie dazu den Wert "10" im Editorfenster ein.
- Im Prozessdatenobjekt "Modes of operation display" wird der Wert "10" zurückgemeldet.
- Auf das Anzeige-Element des Umrichters wird den Wert "17" angezeigt.
- Stellen Sie im Prozessdatenobjekt "Target torque" den Drehmomentsollwert ein. Der Solldrehmoment wird in 0.1 % Motor-Nenndrehmoment angegeben.