Open Loop
Open Loop | Taktsynchrone Positionierung | |
|---|---|
Betriebsart: 8: Taktsynchrone Positionierung | |
Open Loop 0: Geber-Wert ist 0 (fix). 1: Geber-Wert wird in 0x8F00-02 - Geber - Istwert ausgegeben. | |
Vorgabe der Sollposition | |
Die Anzeige ist abhängig von der Einstellung unter 0x8F00-01 - Geberrückführung Konfiguration. | |
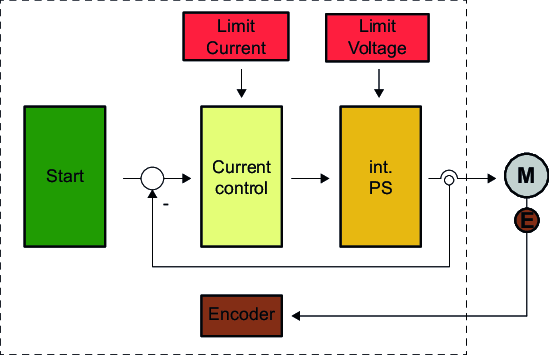
Der Open Loop hat folgende Eigenschaften:
- Das Funktionsmodul arbeitet im gesteuerten Betrieb.
- Das Gebersignal geht nicht in die Regelung mit ein.
- Der Sollwert für den Stromregler wird durch Interpolation des taktsynchron vorgegebenen Positionsollwerts erzeugt.
- Die Istposition entspricht dem interpolierten Positionswert.
- Abhängig von der Einstellung unter 0x8F00-01 - Geberrückführung Konfiguration wird ein Geberwert ausgegeben. Weitere Informationen finden Sie in Kapitel Open Loop.
Struktur
Start | Startparameter |
Limit Position | Positionsbegrenzung |
Limit Voltage | Spannungsbegrenzung |
Position control | Lageregler |
PI control | PI-Stromregler |
M | Motor |
Limit Velocity | Drehzahlbegrenzung |
Limit Current | Strombegrenzung |
PtP | PtP-Positionsprofil |
Velocity control | Drehzahlregler |
int. PS | Interne Leistungsendstufe (power stage) |
Encoder | Geber-Istwert |
Start - Parameter Taktsynchrone Positionierungl
HINWEIS

|
8: Taktsynchrone Positionierungl |
→
|
Start
|
→
|
Current Control Stromregler Geberwert |
0x8F00-01 - Geberrückführung Konfiguration 0: Open Loop (ohne Geber-Istwert) 1: Open Loop (mit Geber-Istwert) |
Limit Current – Strombegrenzung
|
→
|
Limit Current
|
→
|
Current control Stromregler
| |
Current control – Stromregler
Limit Current Strombegrenzung |
→ |
Current control |
→ |
int. PS interne Leistungsendstufe (power stage)
0x8600-10 - Strom - Istwert Wicklung A 0x8600-11 - Strom - Istwert Wicklung B
|
Start | ||||
Limit Voltage – Spannungsbegrenzung
0x8680-04 - Leistungsversorgung - Spannung Warnung Untergrenze |
→
|
Limit Voltage
|
→
|
int. PS interne Leistungsendstufe (power stage) |
0x8680-05 - Leistungsversorgung - Spannung Warnung Obergrenze | ||||
0x8680-06 - Leistungsversorgung - Spannung Fehler Untergrenze | ||||
0x8680-07 - Leistungsversorgung - Spannung Fehler Obergrenze |
interne PS - Interne Leistungsendstufe, Motor, Geber
Limit Voltage Spannungsbegrenzung |
→
|
int. PS
|
→
|
Motor Geber 0x8F00-02 - Geber - IstwertDies gilt nur wenn "0x8F00-01 - Geberrückführung Konfiguration" mit 1 konfiguriert wurde. Ansonsten wird 0 ausgegeben. 0x8680-02 - Leistungsversorgung - Spannung Istwert
|
Current control Stromregler |
