Open loop
Open loop | Speed profile | |
|---|---|
Operating mode: 3: Speed profile | |
Open loop 0: Encoder value is 0 (fixed). 1: Encoder value is output in 0x8F00-02 – Encoder – Actual value. | |
Specification of the target speed | |
Position value of the profile generator. | |
The display is dependent on the setting in 0x8F00-01 – Encoder feedback configuration | |
Open loop has the following features:
- The function module operates in open-loop control mode.
- The encoder signal is not taken into account by the controller.
- The setpoint for the current controller is generated by the higher-level profile generator.
- The actual position corresponds to the position value of the profile generator.
- Depending on the setting under "0x8F00-01 – Encoder feedback configuration", an encoder value is output.
Structure
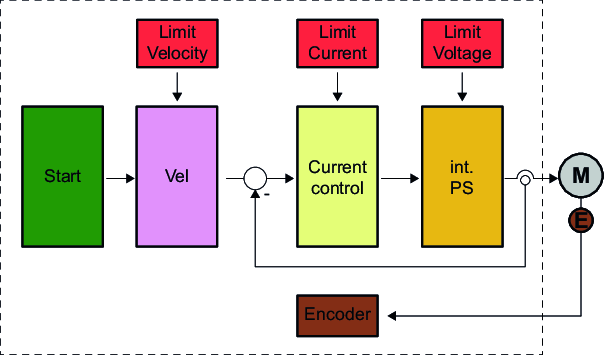
Start | Start parameter |
Limit Velocity | Speed limitation |
Limit Current | Current limitation |
Limit Voltage | Voltage limiting |
Vel | Speed profile |
Vel control | Speed controller |
PI control | PI current controller |
int. PS | Internal power stage |
M | Motor |
Encoder | Actual encoder value |
Start – Speed profile parameters
INFORMATION

0x8280-01 – Setpoint operating mode 3: Speed profile |
→
|
Start
|
→
|
Velocity Speed profile generator
|
Limit – speed limitation
|
→
|
Limit Velocity
|
→
|
Velocity Speed profile generator
| |
Vel – Speed profile
Limit Velocity Speed limitation |
→
|
Vel
|
→
|
Current control Current controller
Encoder value
|
Limit Current
|
→
|
Limit Current
|
→
|
Current control Current controller
| |
Current control
Limit Current Current limitation |
→ |
Current control |
→ |
int. PS Internal power stage
0x8600-02 – Current – Actual value 0x8600-10 – Current – Actual value of winding A 0x8600-11 – Current – Actual value of winding B
|
Vel Speed profile generator | ||||
Limit Voltage
|
→
|
Limit Voltage
|
→
|
int. PS Internal power stage | |
Internal PS – power output stage, motor, encoder
Limit Voltage Voltage limiting |
→
|
int. PS
|
→
| Motor Encoder 0x8F00-02 – Encoder – Actual value
|
Current control Current controller |
