Modos de funcionamiento
AVISO
El módulo de software MOVIKIT® Velocity Drive utiliza el modo de funcionamiento de regulación de velocidad (200). Al utilizar MOVIKIT® Velocity Drive, no se puede activar manualmente el modo de funcionamiento.
Modos de funcionamiento de MOVIKIT® Positioning Drive y ámbitos de aplicación:
Modo de funcionamiento | Decimal | Descripción |
|---|---|---|
Modo manual | 100 | Manual regulado por posición (FCB 20) Realimentación del encoder necesaria |
101 | Manual regulado por velocidad (FCB 05) Realimentación del encoder no necesaria | |
Especificación de velocidad | 200 | Regulación de velocidad (FCB 05) Realimentación del encoder no necesaria |
Modo de referenciación | 300 | Búsqueda de referencia – Offset a través del parámetro (FCB 12) |
301 | Búsqueda de referencia – Offset a través del bus de campo (FCB 12) | |
Modo de posicionamiento
| 400 | Posicionamiento absoluto (FCB 09) |
401 | Posicionamiento relativo (FCB 09) | |
402 | Posicionamiento módulo en sentido positivo (FCB 09) | |
403 | Posicionamiento módulo en sentido negativo (FCB 09) | |
404 | Posicionamiento módulo en sentido óptimo (FCB 09) | |
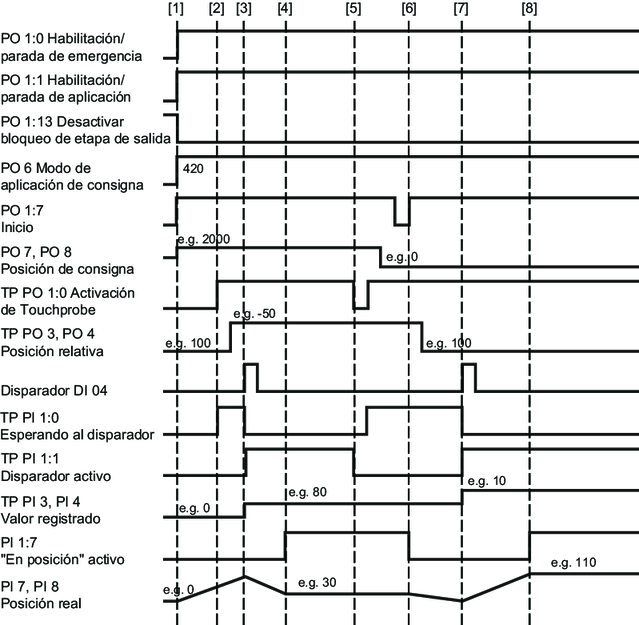
420 | Posicionamiento Touchprobe – Posición de destino absoluta – Recorrido restante en sentido de marcha (FCB 09) | |
421 | Posicionamiento Touchprobe – Posición de destino absoluta – Recorrido restante con signo (FCB 09) | |
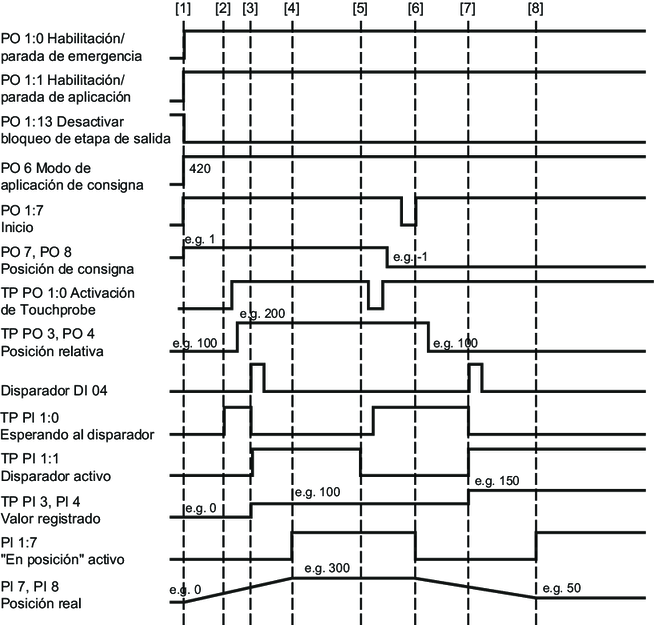
422 | Posicionamiento Touchprobe – Infinito – Recorrido restante en sentido de marcha (FCB 09) | |
423 | Posicionamiento Touchprobe – Infinito – Recorrido restante con signo (FCB 09) | |
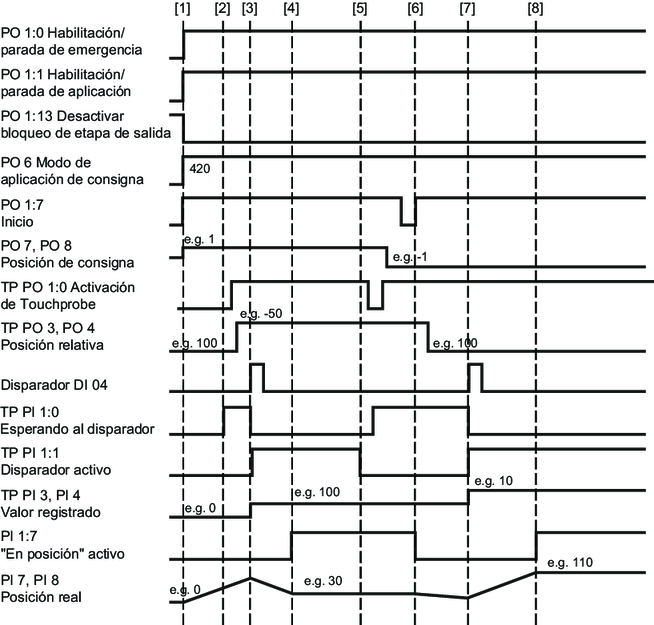
Prueba de freno | 700 | Prueba de freno (FCB 21) Modo de funcionamiento para la función adicional Prueba de freno |
AVISO
Para el funcionamiento de los bloques funcionales son válidas las configuraciones efectuadas en MOVISUITE®. Los modos de funcionamiento del módulo (Modulo) solo se pueden utilizar si en la configuración del módulo de software se ha ajustado una limitación de ciclo en el menú [Funciones de vigilancia] > [Valores límite].
AVISO
El comportamiento en parada depende del ajuste del parámetro "Comportamiento en parada (índice 8563.1/8564.1)
AVISO
A partir de la versión 2.1 del módulo de software, la primera vez que se seleccionan los modos de funcionamiento "401: posicionamiento relativo", "402: Posicionamiento módulo en sentido positivo", "403: Posicionamiento módulo en sentido negativo" y "404: Posicionamiento módulo en sentido óptimo" se cambia brevemente a FCB 26 para definir correctamente el punto de referencia del posicionamiento relativo.
Si el accionamiento sigue en movimiento en el momento en que se selecciona el modo de aplicación 401, se utiliza FCB 26 para desacelerar hasta la detención. El punto de parada es el punto de referencia para el posicionamiento relativo. Al cambiar a los modos de aplicación 402, 403 y 404 no se produce ninguna deceleración.
Para aclarar el principio de funcionamiento encontrará en los siguientes capítulos sobre cada uno de los modos de funcionamiento un diagrama de tiempos, así como la secuencia de proceso con una descripción de las señales a activar y los estados de señal.
- Requisito para diagramas de tiempos
- Modo manual (100/101)
- Regulación de velocidad (200)
- Modo de búsqueda de referencia (300/301)
- Modo de posicionamiento absoluto (400)
- Modo de posicionamiento relativo (401)
- Modo de posicionamiento módulo en sentido positivo (402)
- Modo de posicionamiento módulo en sentido negativo (403)
- Modo de posicionamiento módulo en sentido óptimo (404)
- Posicionamiento Touchprobe - Posición de destino absoluta – Recorrido restante en sentido de marcha (420)
- Modo de posicionamiento Touchprobe - Posición de destino absoluta – Recorrido restante con signo (421)
- Modo de posicionamiento Touchprobe - Infinito – Recorrido restante en sentido de marcha (422)
- Modo de posicionamiento Touchprobe - Infinito – Recorrido restante con signo (423)