Modos de operação
INFORMAÇÃO
O módulo de software MOVIKIT® Velocity Drive usa o modo de operação do controle de rotação (200). O modo de operação não pode ser ativado manualmente ao usar o MOVIKIT® Velocity Drive.
Modos de operação do MOVIKIT® Positioning Drive e respectivas áreas de aplicação:
Modo de operação | Decimal | Descrição |
|---|---|---|
Operação manual | 100 | Operação manual – Controlado por posição (FCB 20) Realimentação do encoder necessária |
101 | Operação manual – Controlado por rotação (FCB 05) Realimentação do encoder desnecessária | |
Especificação da rotação | 200 | Controle de rotação (FCB 05) Realimentação do encoder desnecessária |
Modo de referenciamento | 300 | Referenciamento – Offset através de parâmetro (FCB 12) |
301 | Referenciamento – Offset através de fieldbus (FCB 12) | |
Modo de posicionamento
| 400 | Posicionamento absoluto (FCB 09) |
401 | Posicionamento relativo (FCB 09) | |
402 | Posicionamento do módulo – Direção positiva (FCB 09) | |
403 | Posicionamento do módulo – Direção negativa (FCB 09) | |
404 | Posicionamento do módulo – Direção otimizada (FCB 09) | |
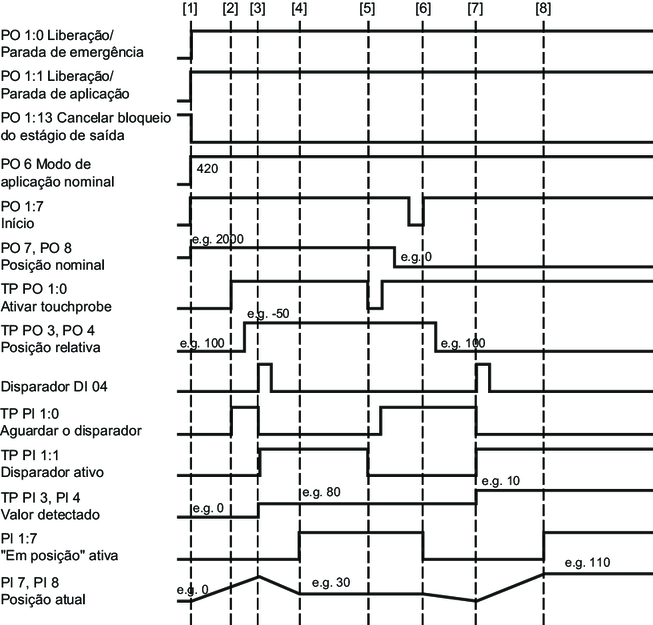
420 | Posicionamento de Touchprobe – Posição final absoluta – distância restante na direção do deslocamento (FCB 09) | |
421 | Posicionamento de Touchprobe – Posição final absoluta – Distância restante com sinal +/- (FCB 09) | |
422 | Posicionamento de Touchprobe – Sem fim – Distância restante na direção do deslocamento (FCB 09) | |
423 | Posicionamento de Touchprobe – Sem fim – Distância restante com sinal +/- (FCB 09) | |
Teste de frenagem | 700 | Teste de frenagem (FCB 21) Modo de operação para a função adicional Teste de frenagem |
INFORMAÇÃO
As configurações realizadas no MOVISUITE® se aplicam à operação dos módulos funcionais. Os modos de operação do módulo somente podem ser usados se uma limitação de ciclo tiver sido definida na configuração do módulo de software em [Funções de monitoração] > [Valores máximos].
INFORMAÇÃO
O comportamento na parada depende da configuração do parâmetro "Comportamento na parada (índice 8563.1/8564.1)
INFORMAÇÃO
A partir da versão 2.1 dos módulos de software, na primeira vez que selecionar o modo de aplicação "401: Posicionamento relativo", "402: Posicionamento do módulo – Direção positiva", "403: Posicionamento do módulo – Direção negativa e "404: Posicionamento do módulo – Direção otimizada" alterado brevemente para FCB 26 para definir corretamente o ponto de referência para o posicionamento relativo.
Se o acionamento ainda estiver em movimento quando o modo de aplicação 401 for selecionado, o FCB 26 é usado para desacelerar até parar. O ponto de parada é o ponto de referência para o posicionamento relativo. Ao mudar para os modos de aplicação 402, 403 e 404, não há desaceleração.
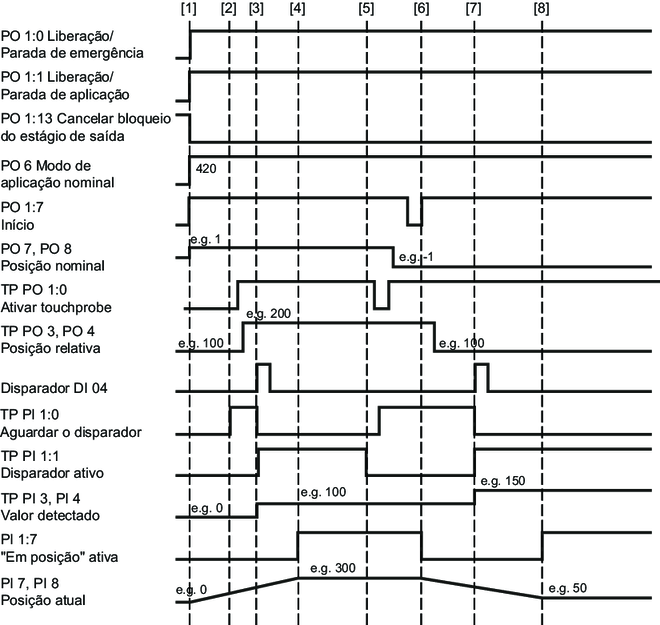
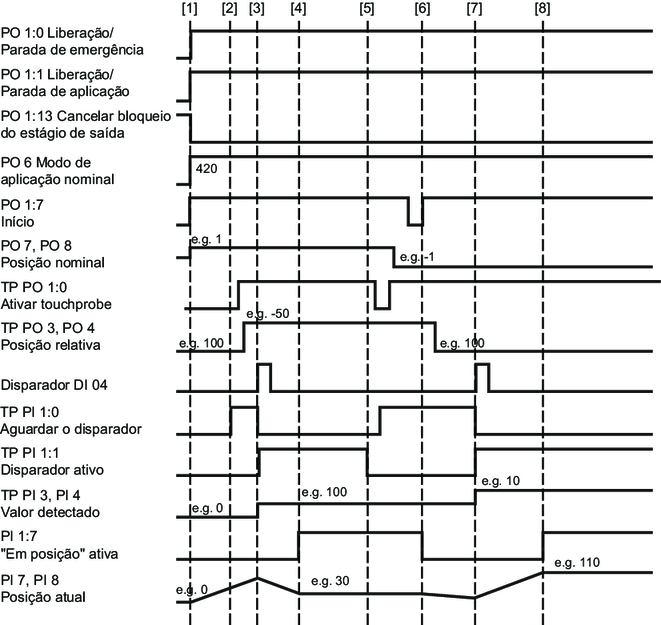
Para clarificação do princípio de operação, nos capítulos seguintes, para cada modo de operação está disponível um diagrama de ciclos e a sequência do processo com uma descrição dos sinais a definir e dos estados do sinal.
- Pré-requisito para diagramas de ciclos
- Operação manual (100/101)
- Controle de rotação (200)
- Modo de referenciamento (300/301)
- Modo de posicionamento absoluto (400)
- Modo de posicionamento relativo (401)
- Modo de posicionamento do módulo – Direção positiva (402)
- Modo de posicionamento do módulo – Direção negativa (403)
- Modo de posicionamento do módulo – Direção otimizada (404)
- Modo de posicionamento Touchprobe – Posição final absoluta – Distância restante na direção de deslocamento (420)
- Modo de posicionamento Touchprobe – Posição final absoluta – Distância restante com sinal +/- (421)
- Modo de posicionamento Touchprobe – Contínuo – Distância restante na direção de deslocamento (422)
- Modo de posicionamento Touchprobe - Contínuo - Distância restante com sinal +/- (423)