Modes d'exploitation
REMARQUE
Le module logiciel MOVIKIT® Velocity Drive utilise le mode d'exploitation "Régulation de vitesse (200)". En cas d'utilisation du module MOVIKIT® Velocity Drive, le mode d'exploitation ne peut pas être activé manuellement.
Modes d'exploitation du module MOVIKIT® Positioning Drive avec leurs champs d'application
Mode d'exploitation | Décimal | Description |
|---|---|---|
Mode Jogg | 100 | Mode Jogg – Régulation de position (FCB 20) Retour codeur indispensable |
101 | Mode Jogg – Régulation de vitesse (FCB 05) Retour codeur pas indispensable | |
Consigne de vitesse | 200 | Régulation de vitesse (FCB 05) Retour codeur pas indispensable |
Mode prise de référence | 300 | Prise de référence – Offset via paramètre (FCB 12) |
301 | Prise de référence – Offset via bus de terrain (FCB 12) | |
Mode positionnement
| 400 | Positionnement absolu (FCB 09) |
401 | Positionnement relatif (FCB 09) | |
402 | Positionnement modulo – Sens positif (FCB 09) | |
403 | Positionnement modulo – Sens négatif (FCB 09) | |
404 | Positionnement modulo – Sens optimisé (FCB 09) | |
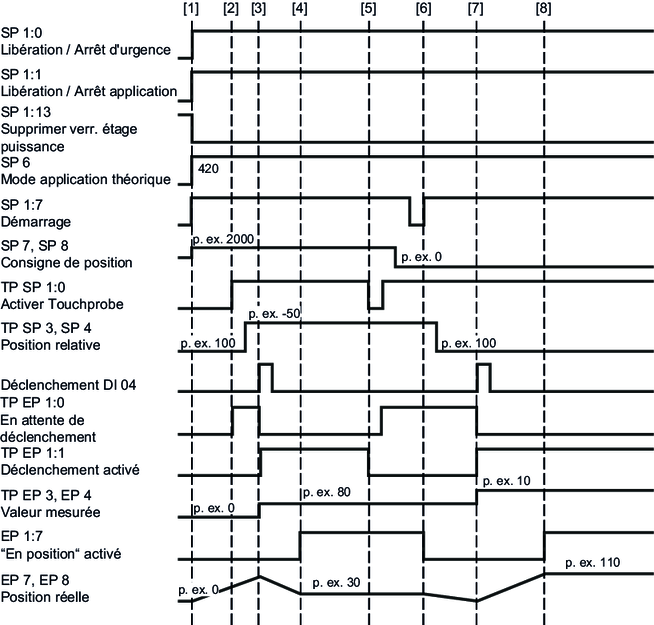
420 | Positionnement Touchprobe – Position cible absolue – Distance restante dans le sens de marche (FCB 09) | |
421 | Positionnement Touchprobe – Position cible absolue – Distance restante avec signe (FCB 09) | |
422 | Positionnement Touchprobe – Sans fin – Distance restante dans le sens de marche (FCB 09) | |
423 | Positionnement Touchprobe – Sans fin – Distance restante avec signe (FCB 09) | |
Test de freinage | 700 | Test de freinage (FCB 21) Mode d'exploitation pour la fonction spéciale Test de freinage |
REMARQUE
Les configurations effectuées dans MOVISUITE® s'appliquent pour l'exploitation des blocs fonction. Les modes d'exploitation modulo peuvent être utilisés uniquement si une limite de cycle a été réglée dans la configuration du module logiciel sous [Fonctions de surveillance] > [Valeurs limites]".
REMARQUE
Le comportement à l'arrêt dépend du réglage du paramètre "Comportement à l'arrêt (index 8563.1/8564.1)".
REMARQUE
À partir de la version 2.1 des modules logiciels, le système active, à la première sélection des modes d'application "401 : positionnement relatif", "402 : positionnement modulo – Sens positif", "403 : positionnement modulo – Sens négatif" et "404 : positionnement modulo – Sens optimisé", brièvement le bloc fonction FCB 26 afin d'initialiser correctement le point de référence du positionnement relatif.
Si l'entraînement est encore en mouvement au moment où le mode d'application 401 est sélectionné, le bloc fonction FCB 26 est utilisé pour décélérer jusqu'à l'arrêt. Le point d'arrêt est le point de référence pour le positionnement relatif. La commutation dans les modes d'application 402, 403 et 404 n'entraîne aucune décélération.
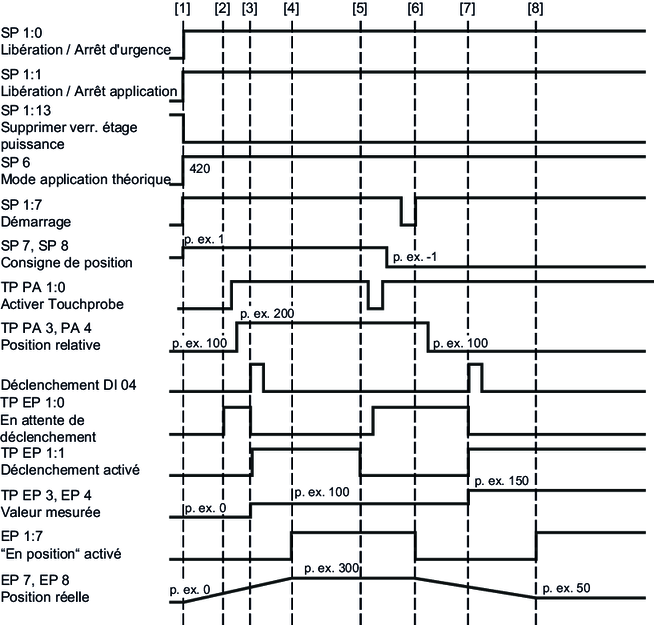
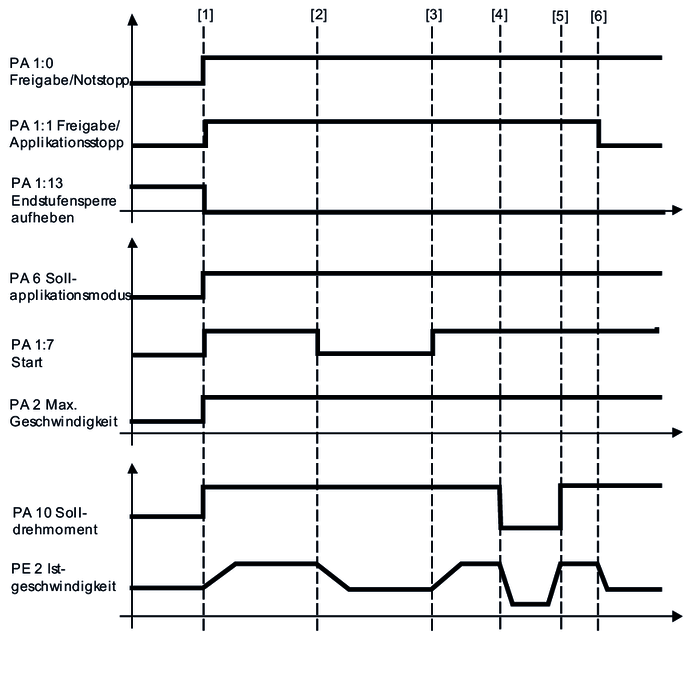
Afin d'expliciter le fonctionnement, les chapitres suivants contiennent des chronogrammes correspondant à chaque mode d'exploitation et décrivent le déroulement du processus ainsi que les signaux à activer et les états des signaux.
- Conditions préalables pour les chronogrammes
- Mode Jogg (100 / 101)
- Régulation de vitesse (200)
- Mode prise de référence (300 / 301)
- Mode positionnement absolu (400)
- Mode positionnement relatif (401)
- Mode positionnement modulo – Sens positif (402)
- Mode positionnement modulo – Sens négatif (403)
- Mode positionnement modulo – Sens optimisé (404)
- Mode positionnement Touchprobe – Position cible absolue – Distance restante dans le sens de marche (420)
- Mode positionnement Touchprobe – Position cible absolue – Distance restante avec signe (421)
- Mode positionnement Touchprobe - Sans fin – Distance restante dans le sens de marche (422)
- Mode positionnement Touchprobe - Sans fin – Distance restante avec signe (423)