Integração do conversor em uma rede POWERLINK
No exemplo é usada a topologia da unidade a seguir:
- Comando de nível superior (CLP) X20CP1585 da Firma B&R Industrial Automation GmbH
- Unidade de acionamento mecatrônico MOVIGEAR® performance com tampa de controle DFC40A..
- Conversor de interface USM21A
A colocação em operação dos outros conversores do kit de automação MOVI‑C® ocorrem da mesma forma.
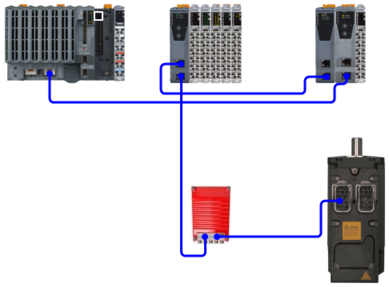
A figura a seguir é uma representação esquemática da topologia da unidade:

[1] | Tensão de alimentação |
[2] | CLP |
[3] | Conexão fieldbus |
[4] | MOVIGEAR® performance |
[5] | Cabo de conexão USB, tipo USB A-B |
[6] | Conversor de interface USM21A |
[7] | Cabo de interface com conector RJ10/RJ10 |
As ferramentas a seguir são utilizadas para configurar e colocar em operação as unidades:
- Automation Studio da B&R Industrial Automation GmbH para o CLP
- MOVISUITE® para os conversores da SEW‑EURODRIVE
Informações adicionais
- Elemento fieldbus no exemplo de projeto
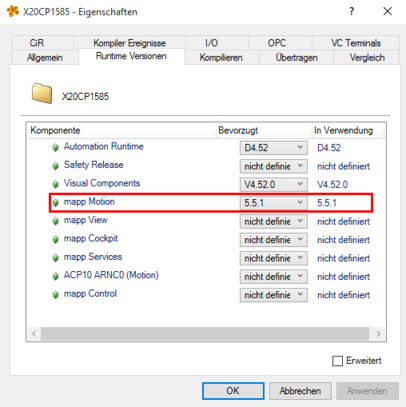
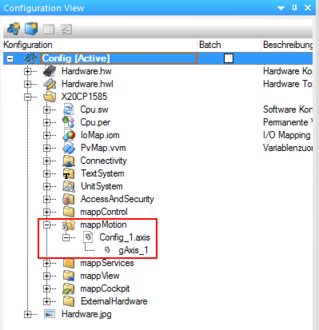
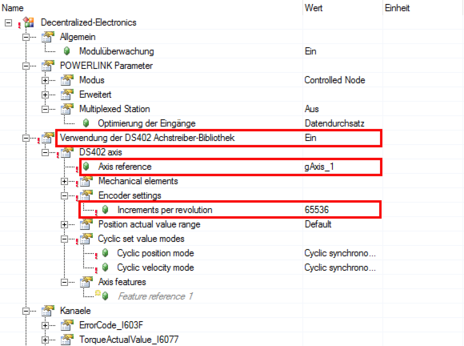
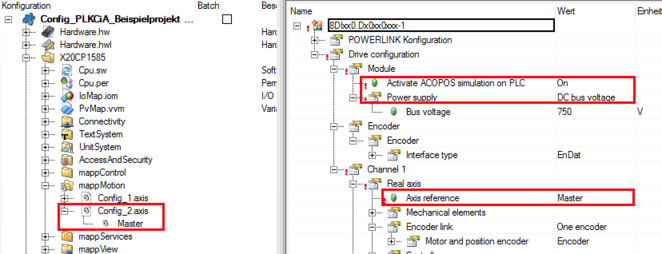
- Integrar e configurar o conversor na rede POWERLINK
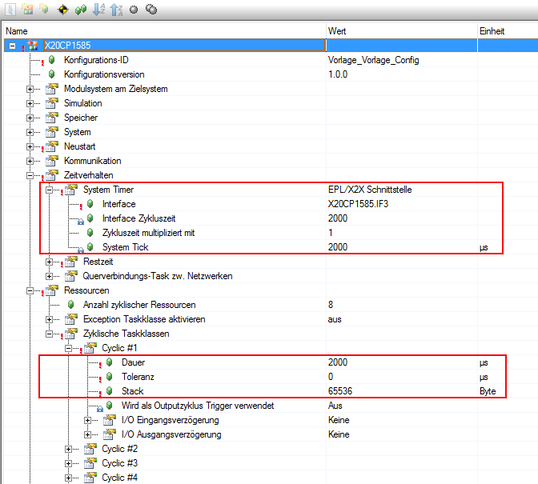
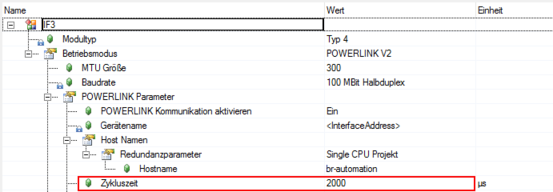
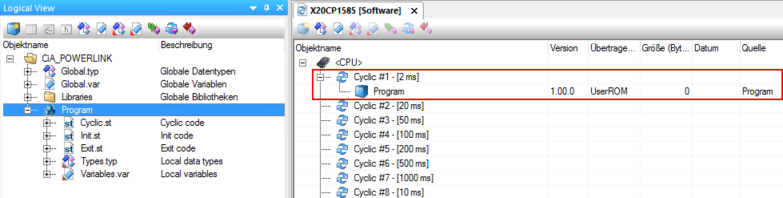
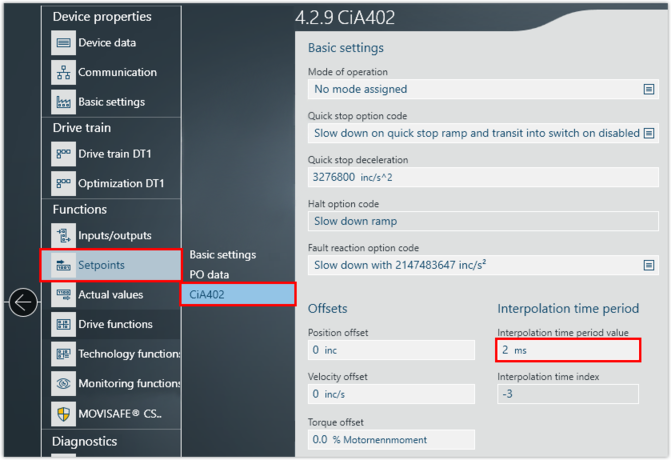
- Ajustar tempo de interpolação
- Configurar o conversor como eixo CiA402
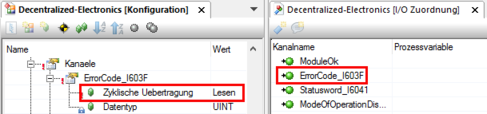
- ajustar imagem PDO
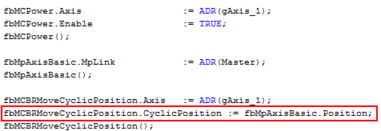
- Ajustar o modo de operação "Profile Position" (pp)
- Ajustar o modo de operação "Profile Velocity" (pv)
- Ajustar o modo de operação "Cyclic Synchronous Position" (csp) e "Cyclic Synchronous Velocity" (csv)
- Ajustar escala