Configuration du maître FSoE
Procéder comme suit.
- Le variateur de vitesse a été intégré dans un projet TwinCAT à partir du catalogue d'appareils par scrutation réseau ou en mode Offline (voir EtherCAT® : intégration des variateurs de vitesse par scrutation réseau ou EtherCAT® : intégration de variateurs de vitesse en mode Offline).
- La communication EtherCAT® non de sécurité a été établie et son fonctionnement sans défaut vérifié.
- Activer le mode "Configuration".
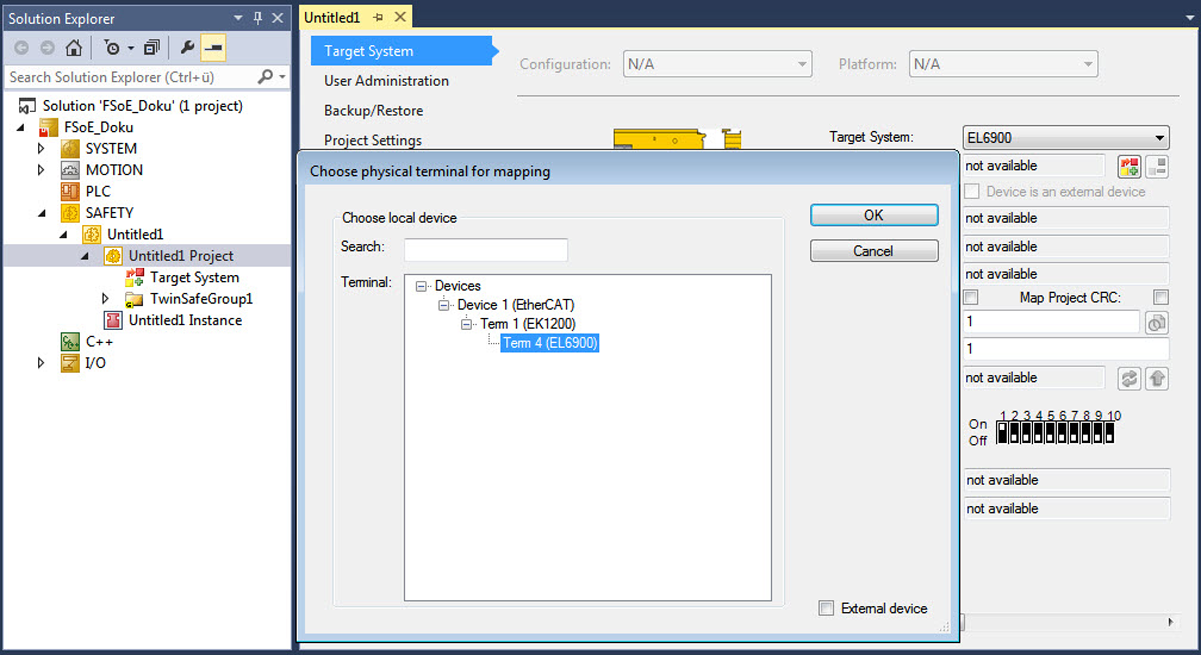
- Dans le bloc [I/O] > [Devices] de la gestion de projet, effectuer un double-clic sur l'esclave EtherCAT® et sélectionner l'onglet "Slots".
- Insérer le module FSoE FSoE Safety I/O 48 bit (0x04020081) dans l'emplacement correspondant.
Variateur de vitesse | Emplacement |
|---|---|
| DriveSafety Axis1
|
Module double-axes MOVIDRIVE® modular MDD.. | DriveSafety Axis2
|


REMARQUE
Dans le cas d'un module double-axes MOVIDRIVE® modular MDD90A (taille 2) les deux demi-axes peuvent être utilisés soit indépendamment l'un de l'autre, soit simultanément avec des cartes de sécurité MOVISAFE® CSS..A.
Dans ce cas, insérer les modules FSoE en conséquence.
- Connecter le matériel du maître FSoE soit via le bus fond de panier, soit via le réseau EtherCAT® avec un outil d'ingénierie. Attention : l'adresse FSoE du maître dans l'outil doit être identique à l'adresse du matériel du maître.