Anwendungsbeispiele
Weiterführende Informationen
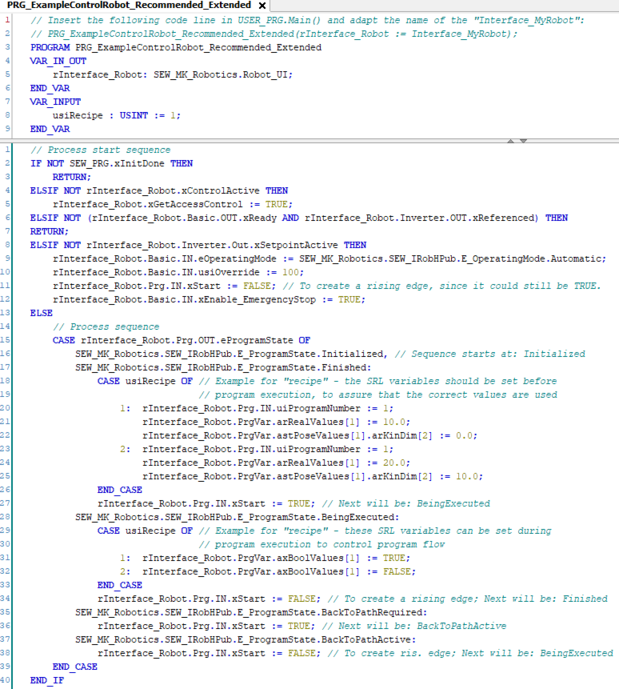
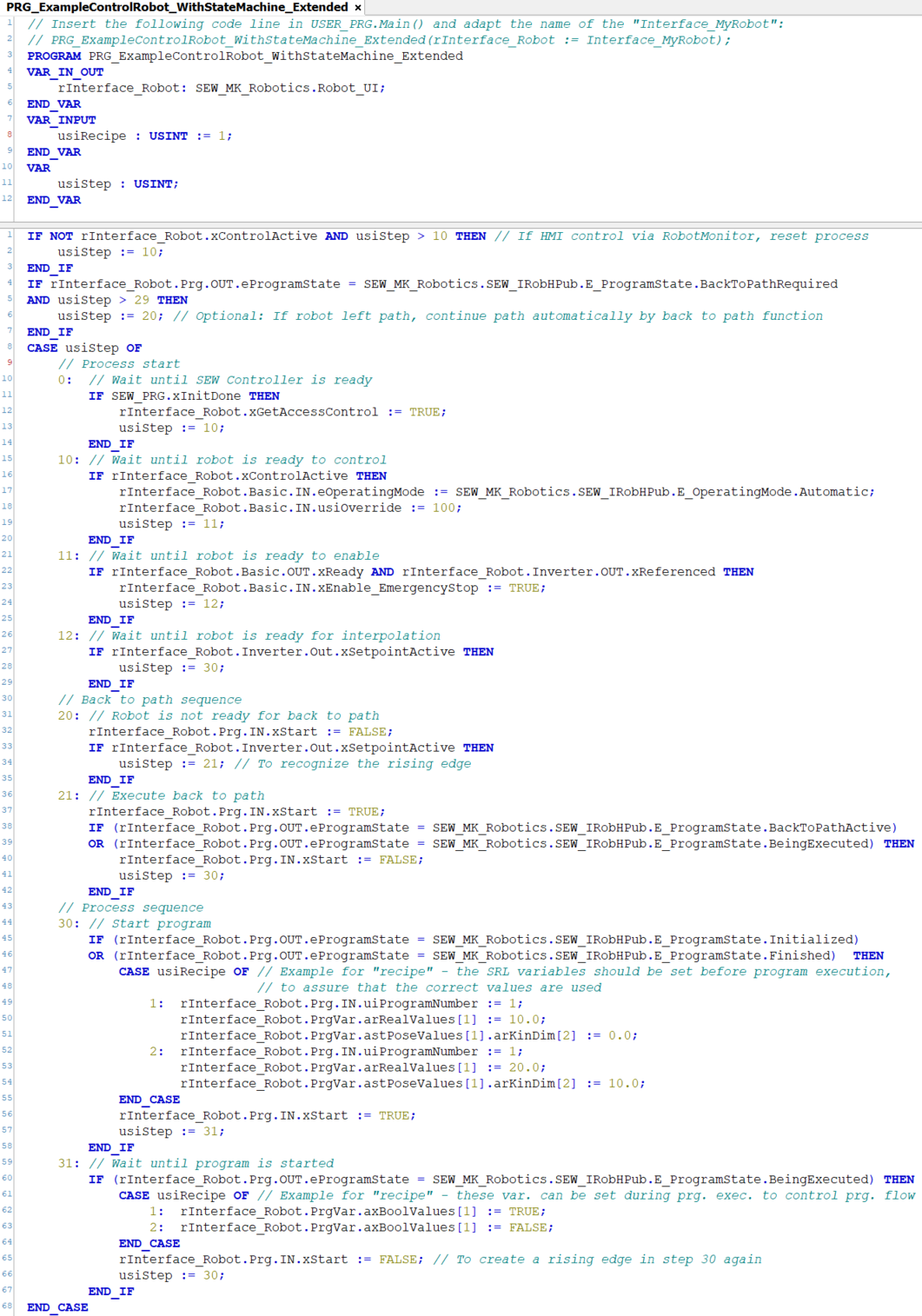
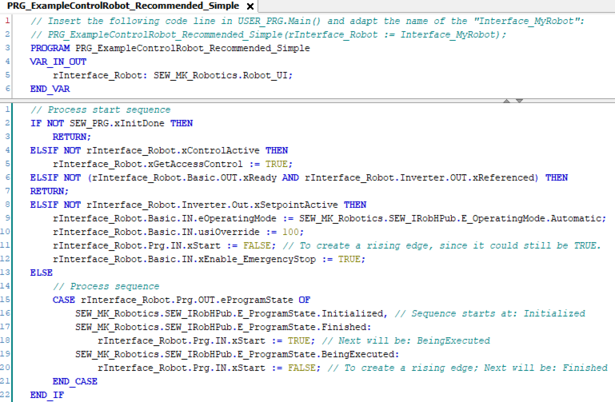
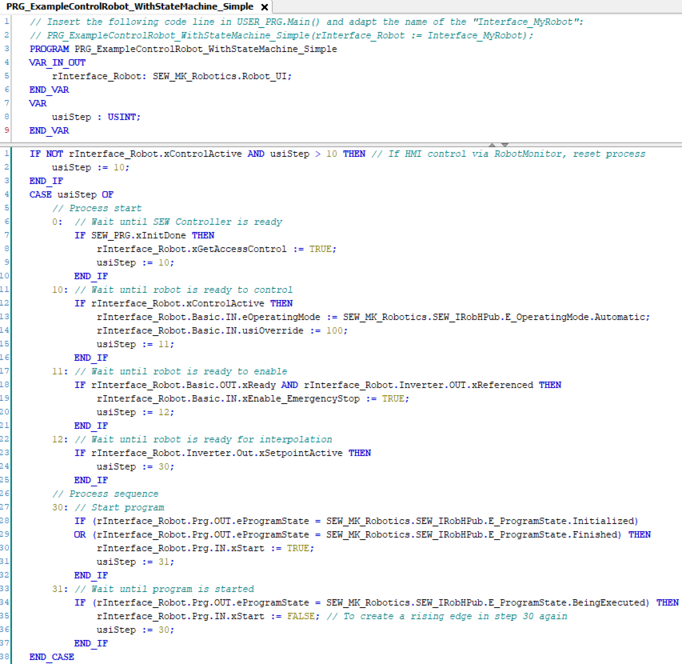
- Ansteuerung über das IEC-Programm
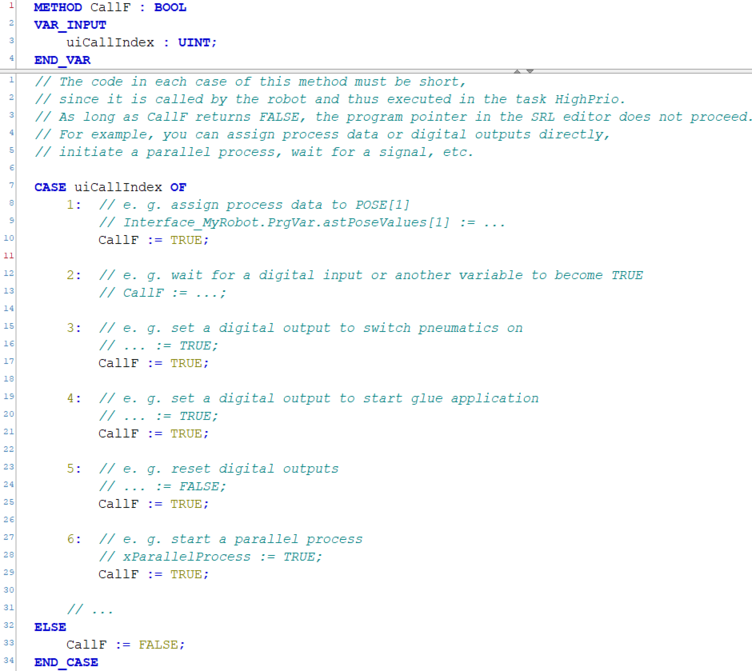
- IEC-Funktionsaufruf für das SRL-Programm
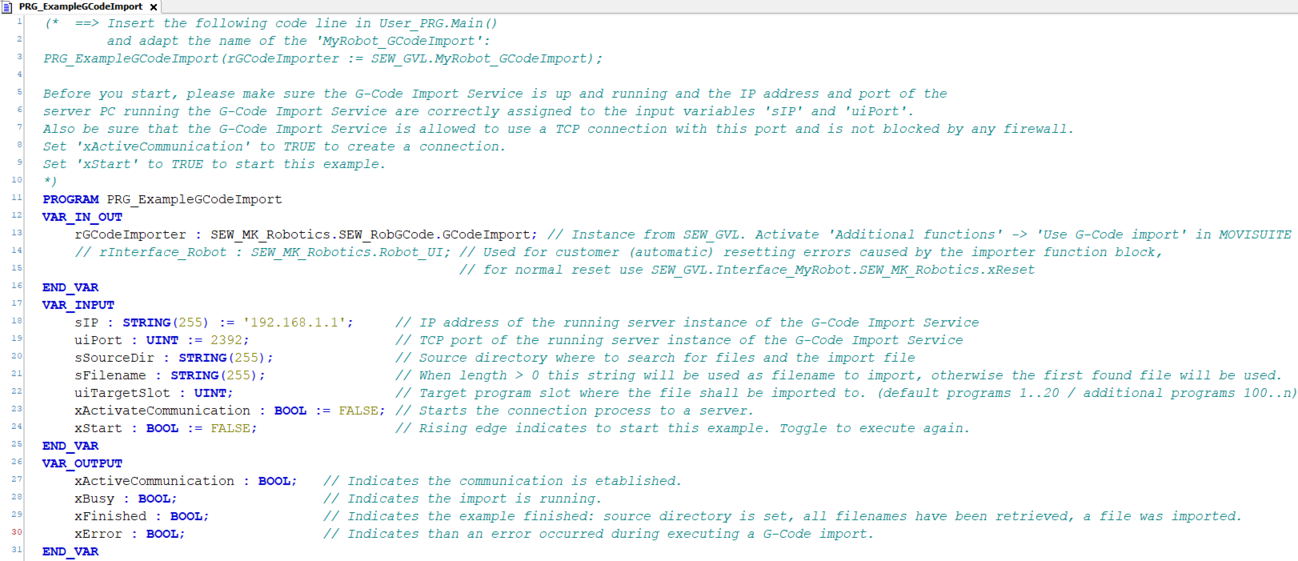
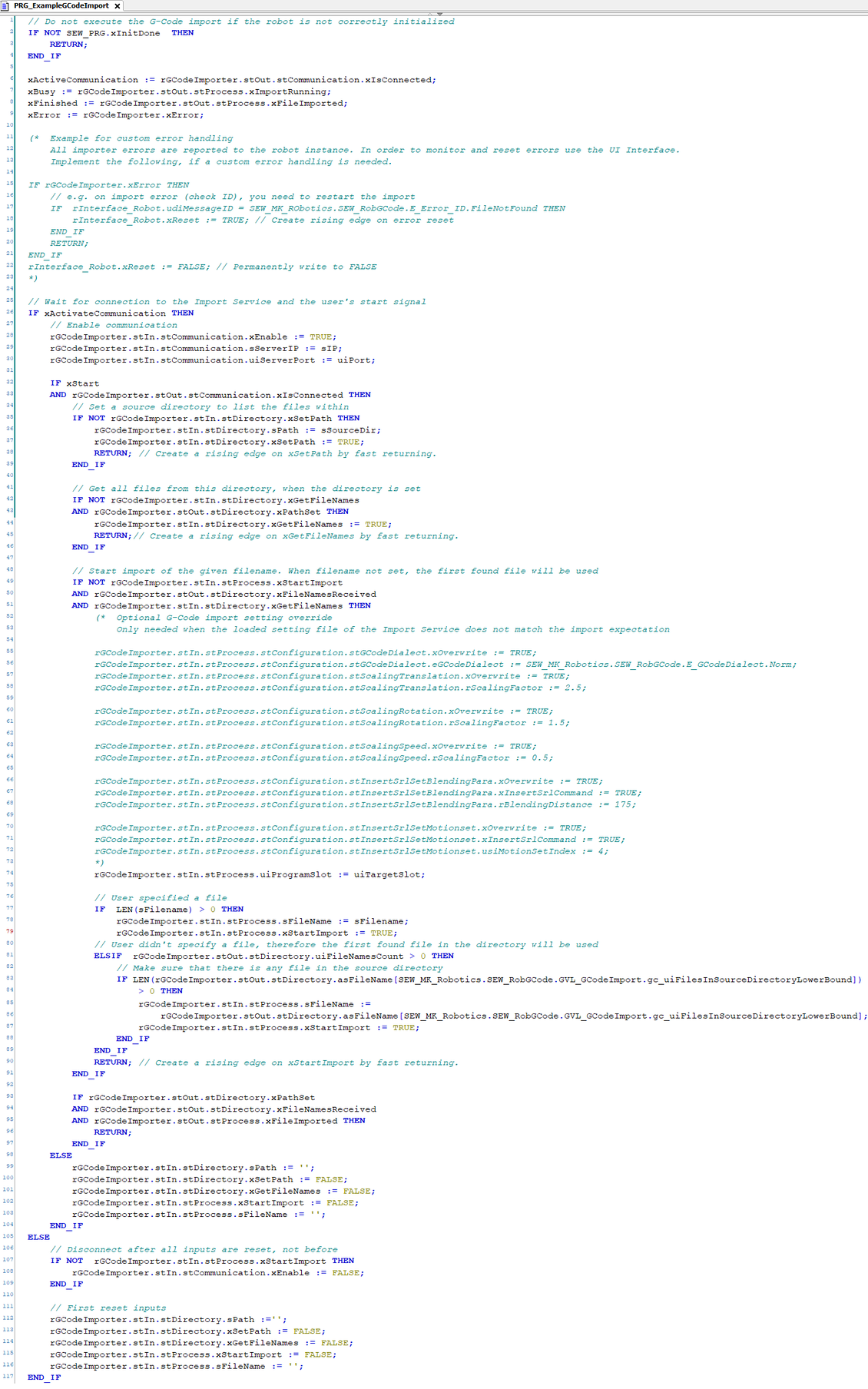
- Automatischer G-Code-Import
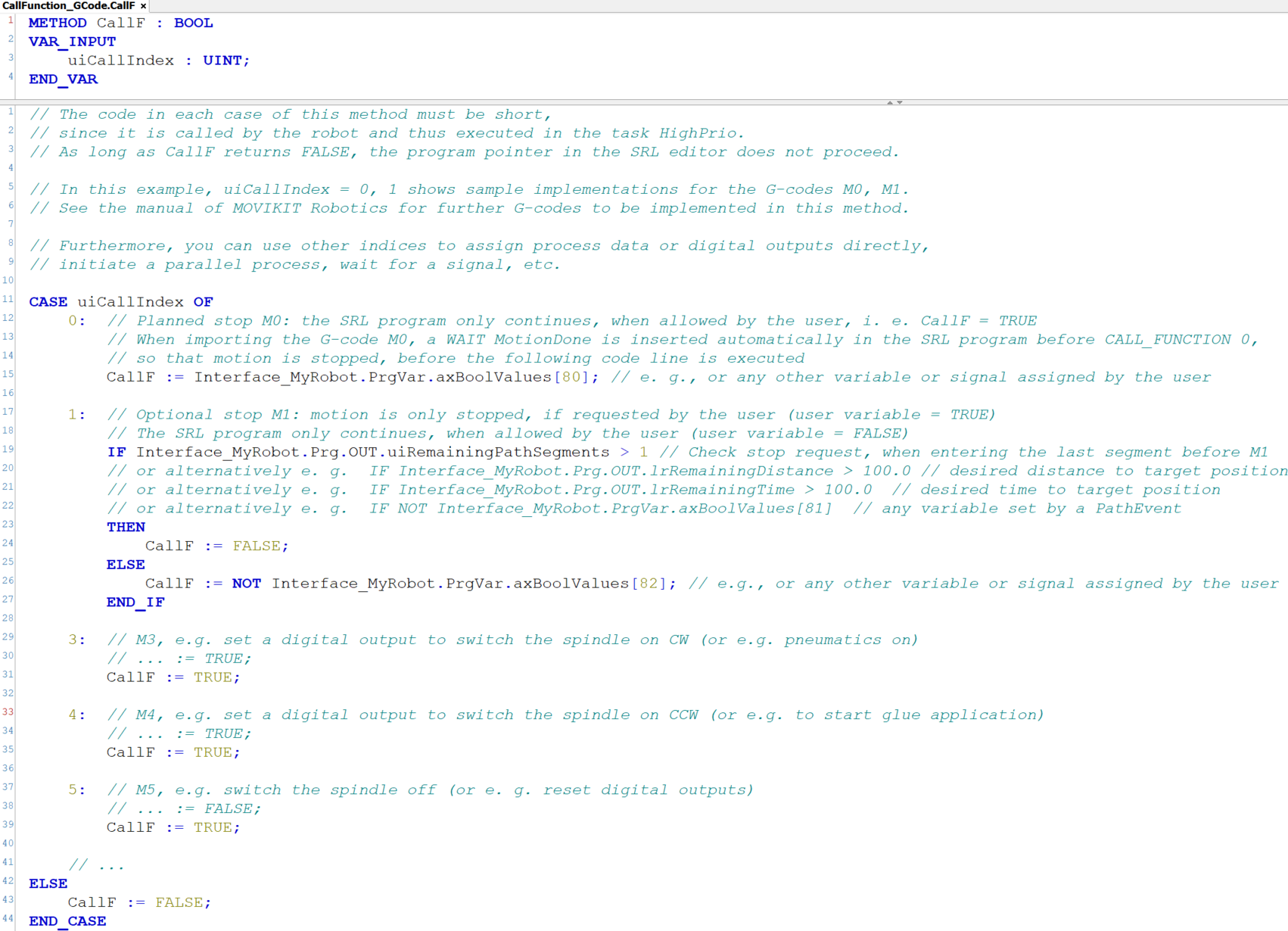
- CallFunction für G-Code
- Statische USER-Koordinatensysteme
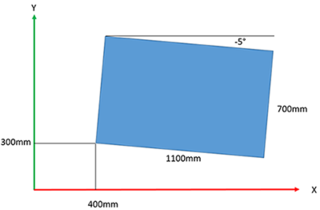
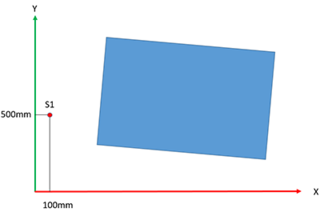
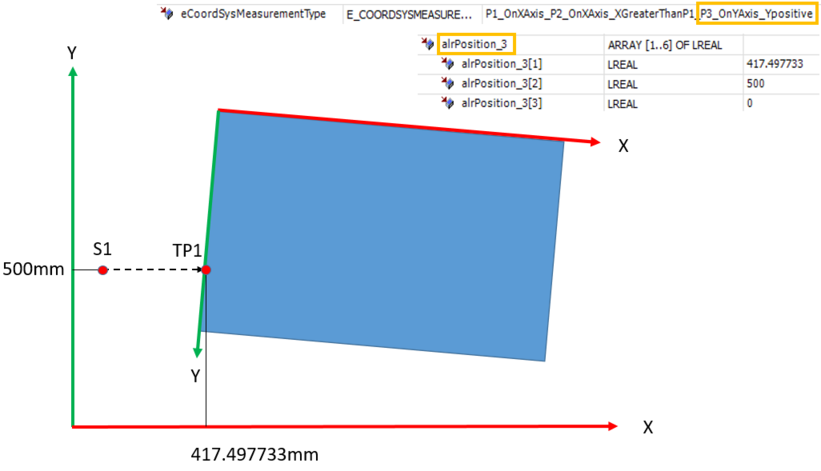
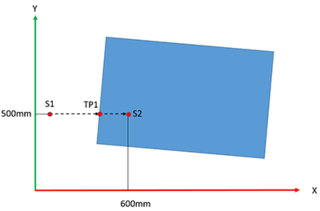
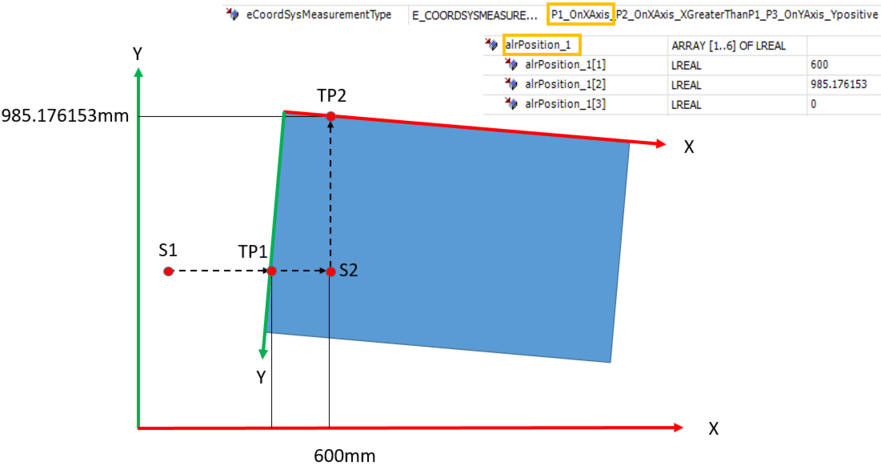
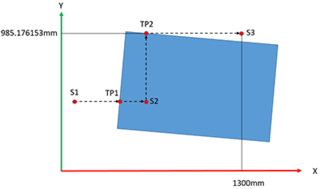
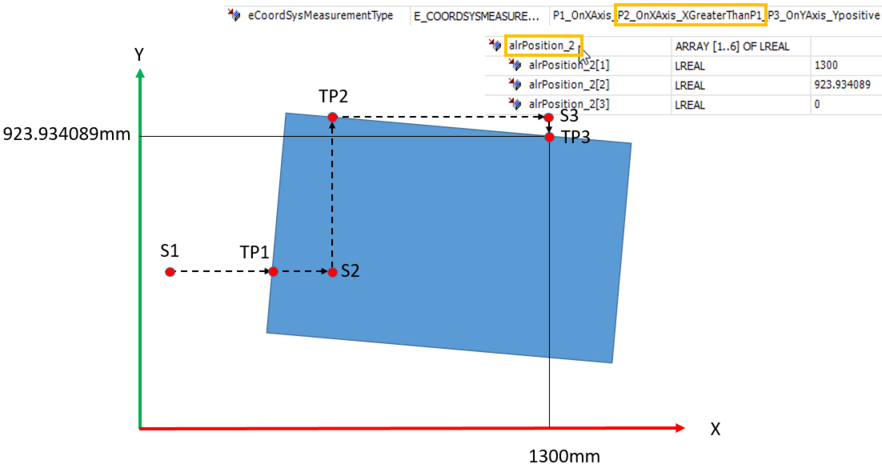
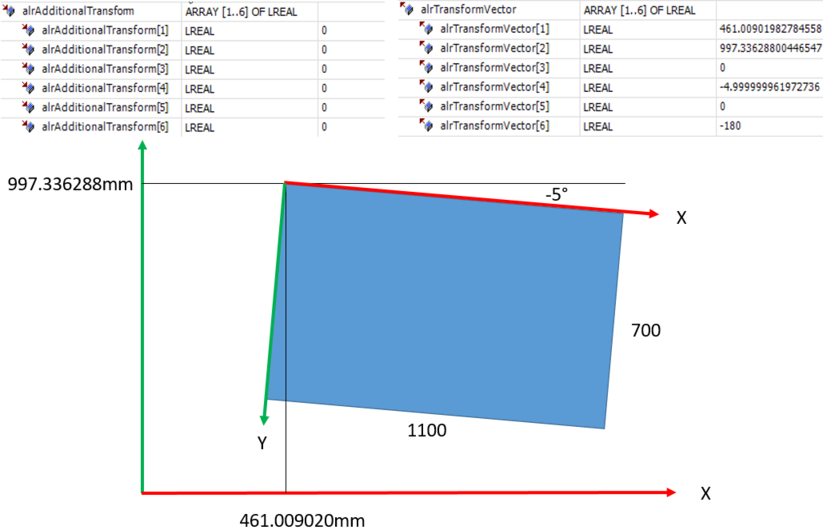
- Vermessung eines Koordinatensystems
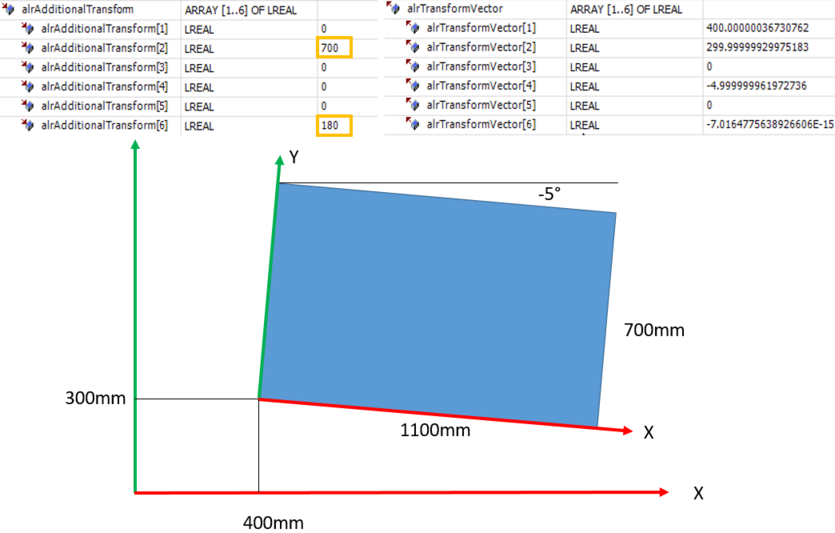
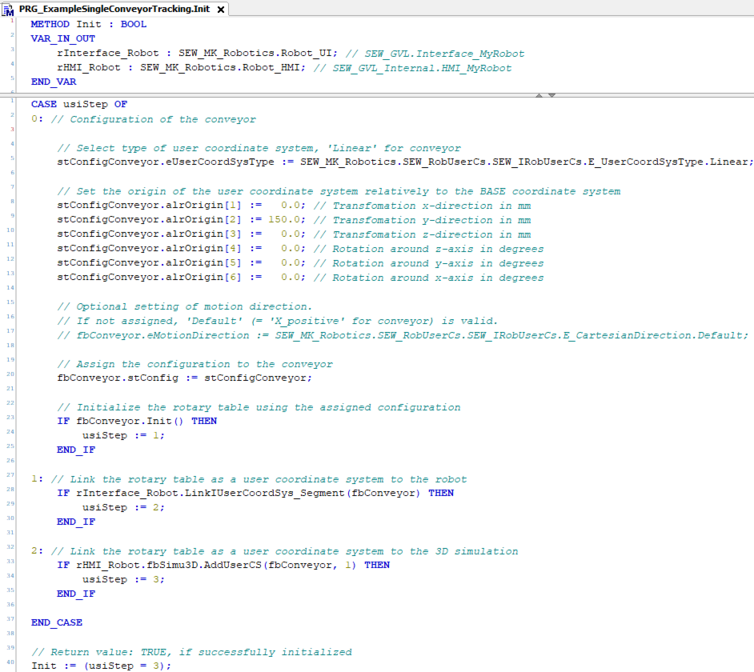
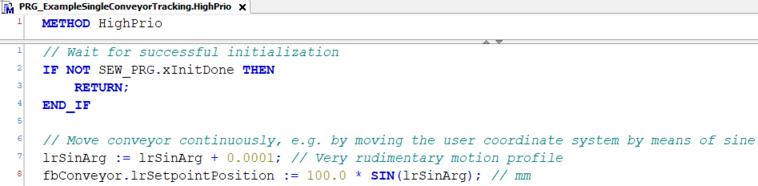
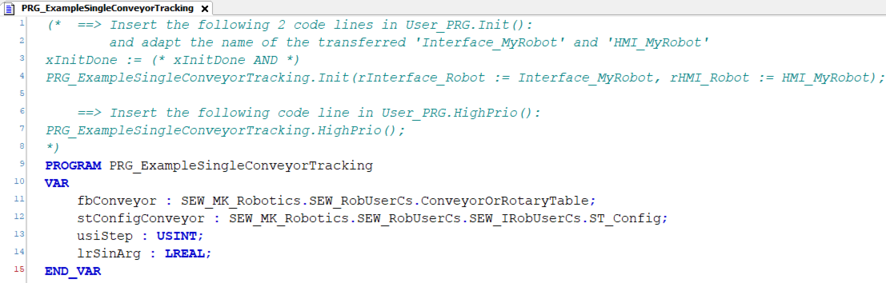
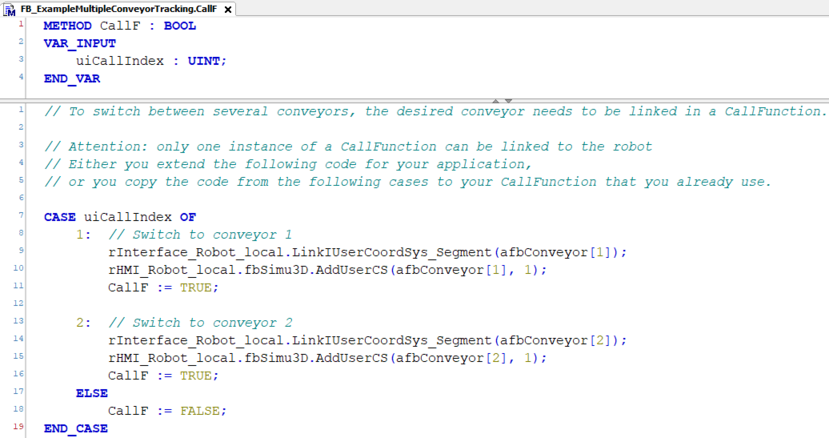
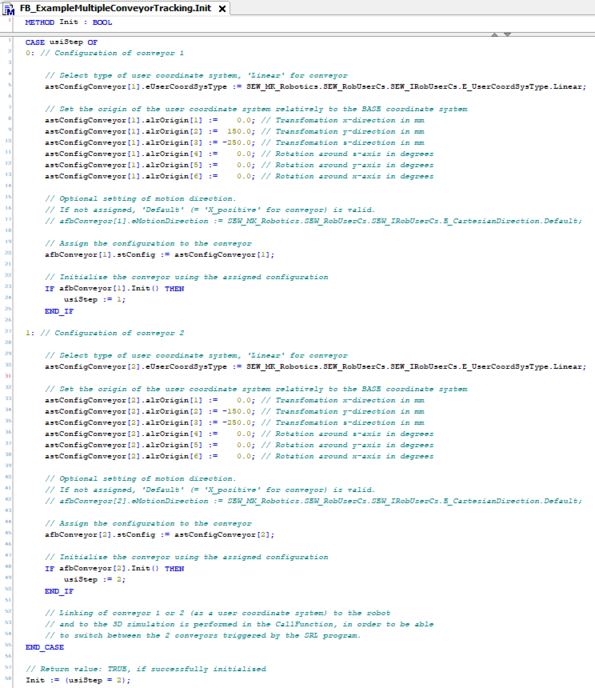
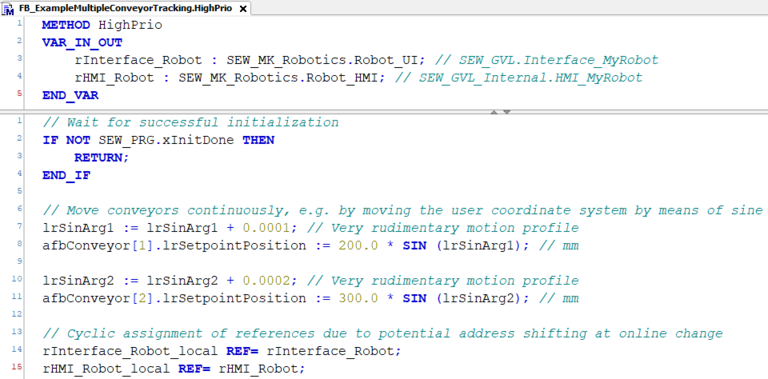
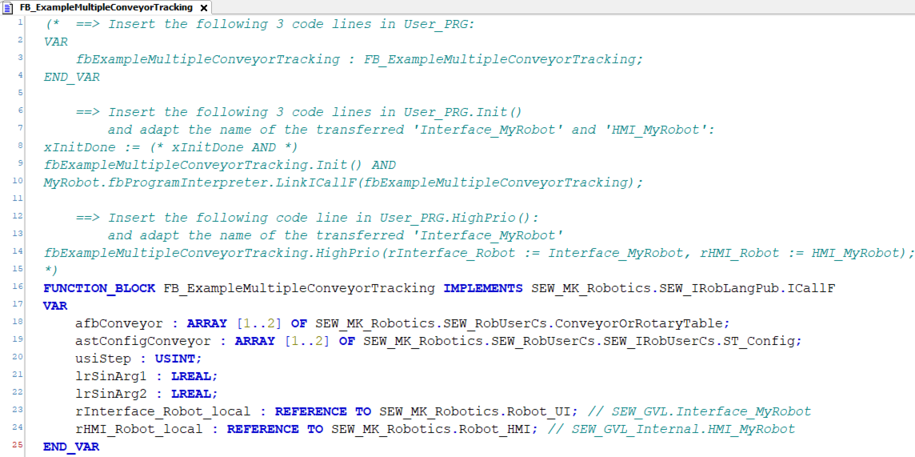
- Synchronisierte Bewegung mit einem Transportband (Conveyor Tracking)
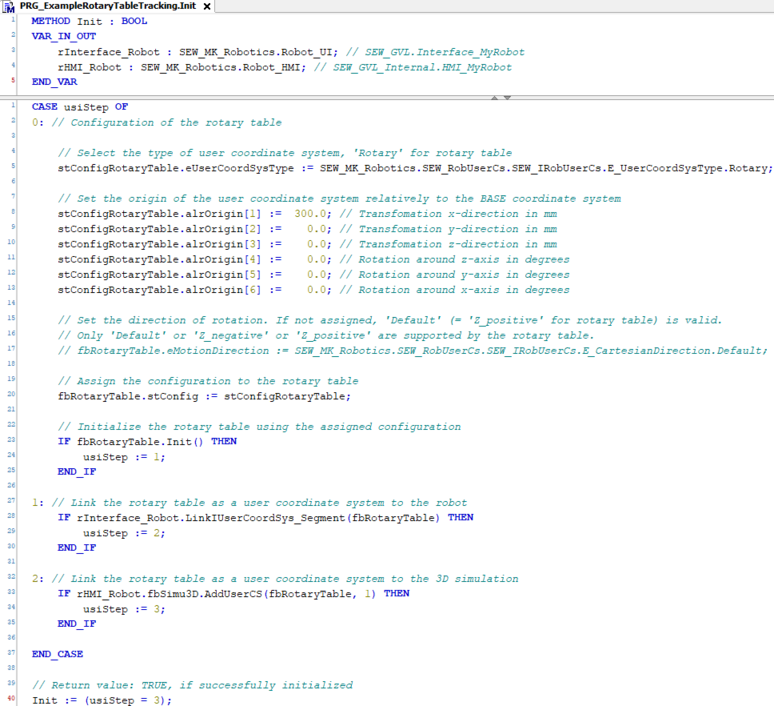
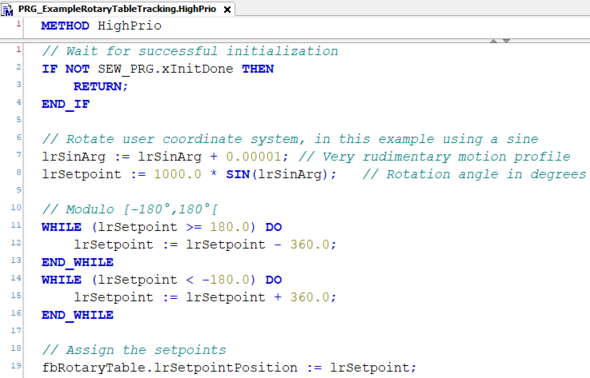
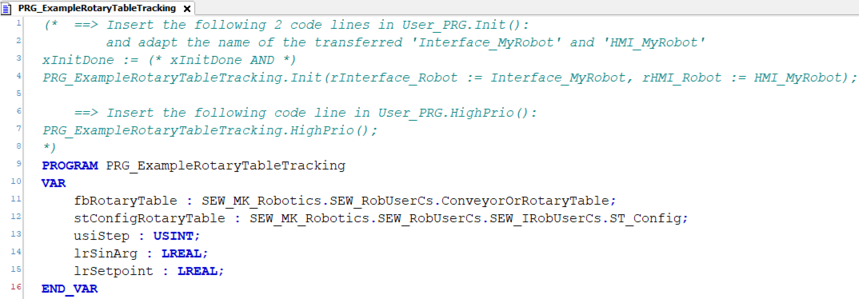
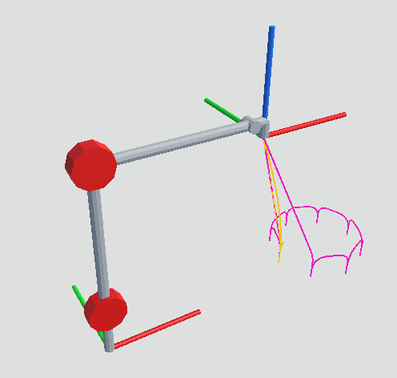
- Synchronisierte Bewegung mit einem Drehtisch
- Besonderheiten bei der Steuerung eines Drehtischs durch den Roboter
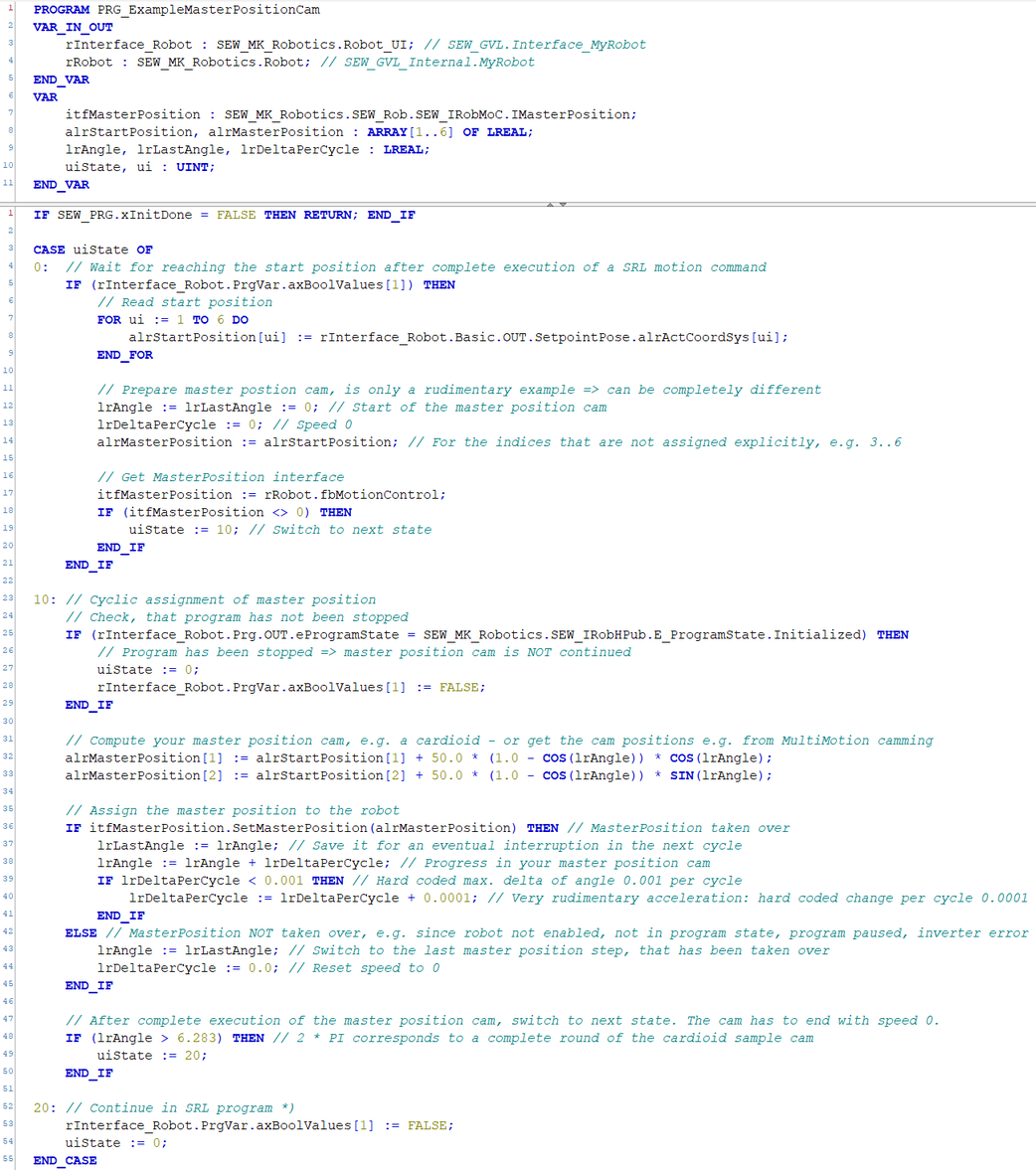
- Kombination von Kurvenscheiben- und Robotikfunktionalität
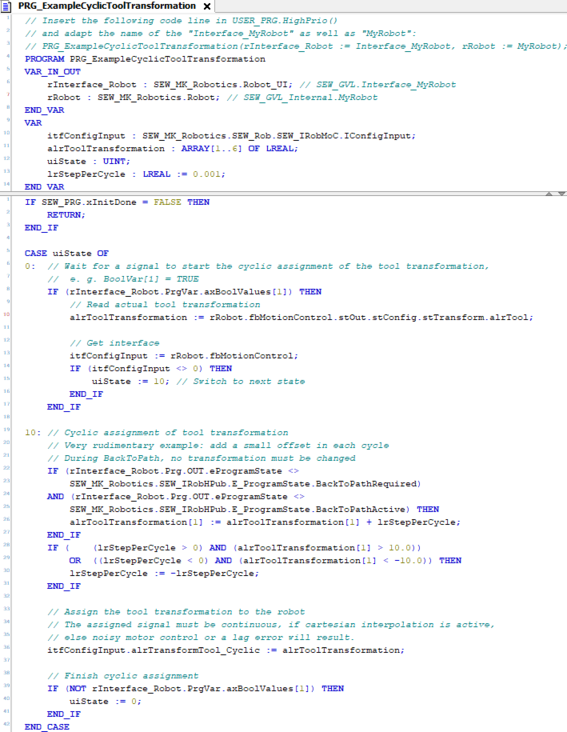
- Stetige Anpassung der Werkzeugtransformation
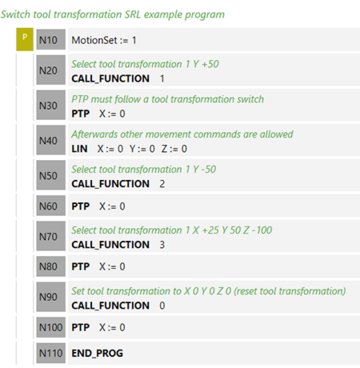
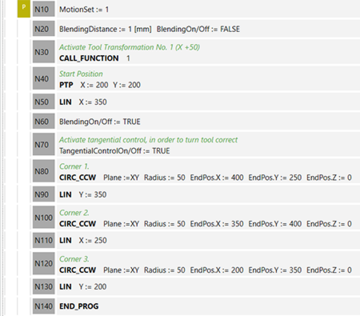
- Sprunghafte Umschaltung der Werkzeugtransformation
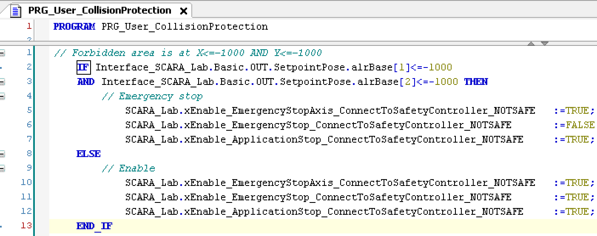
- Nicht sicherheitsbewertete Freigabesteuerung
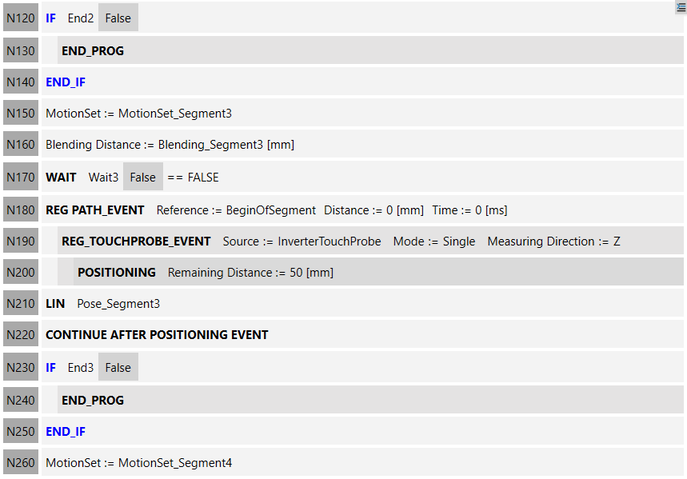
- IEC-Standard-Programm mit Touchprobe
- Externen Anwahlschalter für die Betriebsarten
- Umschaltung auf Steuerung der Einzelachsen
- Freie Funktionstasten des Bedienpanels
- Kombination des RobotMonitors mit einer Visualisierung
- Berechnung der Bewegungsparameter
- Optimierung der Taktzeit
- Inbetriebnahme der Kollisionserkennung
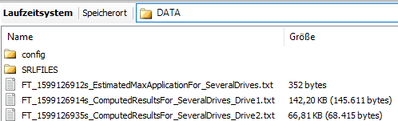
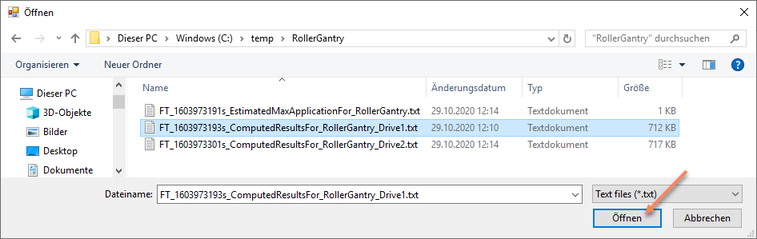
- Antriebsprojektierung für Roboter