IEC-Funktionsaufruf für das SRL-Programm
HINWEIS

Folgendes Beispiel kann im IEC-Editor importiert werden. Öffnen Sie dazu im IEC-Editor das Menü [Tools] > [Skripting] > [Scripts] > [R] und klicken Sie auf den Menüeintrag [Robotics_Examples.py].
Zum Verwenden des Beispiels sind zusätzlich folgende Schritte erforderlich:
- Instanziieren Sie den Funktionsbaustein im Programm User_PRG.
PROGRAM User_PRG
VAR
fbCallFunction : CallFunction;
END_VAR
VAR_OUTPUT
xInitDone : BOOL;
END_VAR
- Fügen Sie folgenden Code in der Aktion User_PRG.INIT ein. Wenn xInitDone in der Aktion bereits vorher durch andere POU zugewiesen wird, verknüpfen Sie die Variable mittels AND ("MyRobot" entspricht dem vom Anwender in MOVISUITE® vergebenen Namen des Roboter-Knotens).
xInitDone := (* xInitDone AND *)
MyRobot.LinkICallF(fbCallFunction);
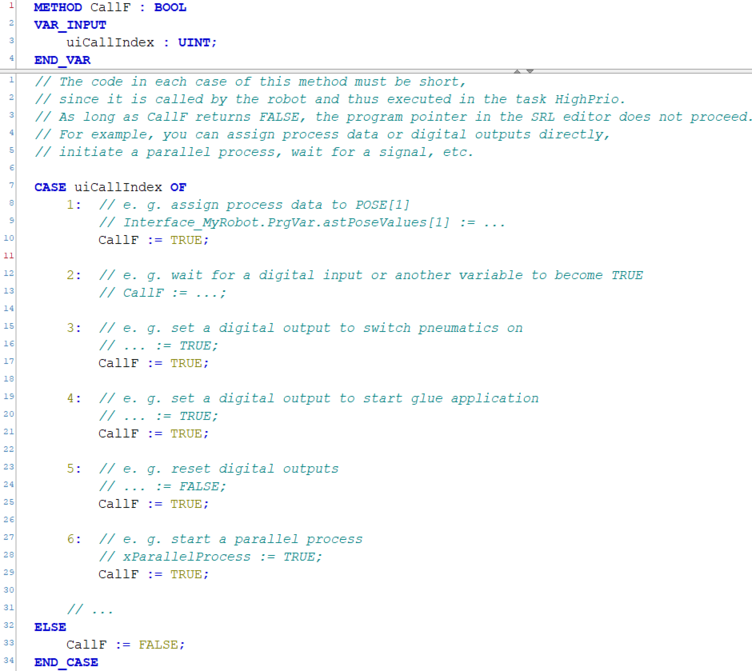
- Implementieren Sie in der Methode CallF die gewünschte Funktionalität.
Weitere Informationen zum IEC-Funktionsaufruf für das SRL-Programm finden Sie im Kapitel IEC-Funktionsaufruf für das SRL-Programm.
