IEC-Funktionsaufruf für das SRL-Programm
Erstellen Sie zum Aufruf einer IEC-Funktion aus dem SRL-Programm im IEC-Programm folgende Funktion:
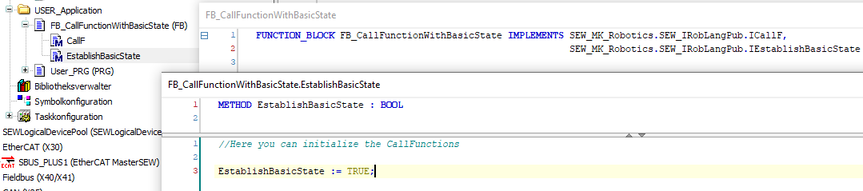
- Legen Sie einen neuen Funktionsblock an (Kontextmenü / Objekt hinzufügen / POU… / Typ: Funktionsbaustein).
- Implementieren Sie mittels des Funktionsbausteins folgendes Interface:
SEW_MK_Robotics.SEW_IRobLangPub.ICallF - Implementieren Sie alle Schnittstellen (Kontextmenü des Funktionsbausteins / Schnittstellen implementieren…).
- Instanzieren Sie den Funktionsbaustein im Programm User_PRG
- Verbinden Sie den Funktionsbaustein mit dem Roboter, in dem Sie in der User_PRG.Init folgende Codezeile hinzufügen ("MyRobot" entspricht dem vom Anwender in MOVISUITE® vergebenen Namen des Roboter-Knotens):
MyRobot.LinkICallF(fbCallFunction); - Programmieren Sie in der Methode CallF eine Fallunterscheidung abhängig von der Variable uiCallIndex.
- Programmieren Sie die gewünschten Funktion in den entsprechenden Zweig der Fallunterscheidung. Der nächste SRL-Befehl wird immer erst nach Setzen von CallF auf "TRUE" abgearbeitet.


Weitere Informationen zum Aufruf der IEC-Funktion im RobotMonitor finden Sie im Kapitel IEC-Funktionsaufruf. Ein Anwendungsbeispiel für den IEC-Funktionsaufruf für das SRL-Programm finden Sie in den Kapiteln IEC-Funktionsaufruf für das SRL-Programm, Bahnereignis und Tangentialsteuerung einstellen.
Weiterführende Informationen