Vermessung eines Koordinatensystems
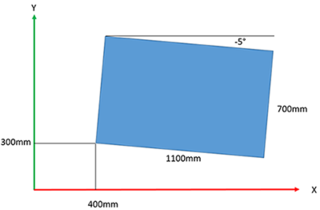
Sie können den Funktionsbaustein SEW_MK_Robotics.SEW_RobUserCs.CoordSysMeasurement dazu verwenden, ein Koordinatensystem zu vermessen, z. B. die Position und Orientierung eines Werkstücks oder eines Transportbands im gewünschten Bezugskoordinatensystem.
Dazu müssen 3 Punkte des zu vermessenden Koordinatensystems aus Sicht des Bezugskoordinatensystems (z. B. BASE) an den Eingangsvariablen Position_1/2/3 angelegt werden.
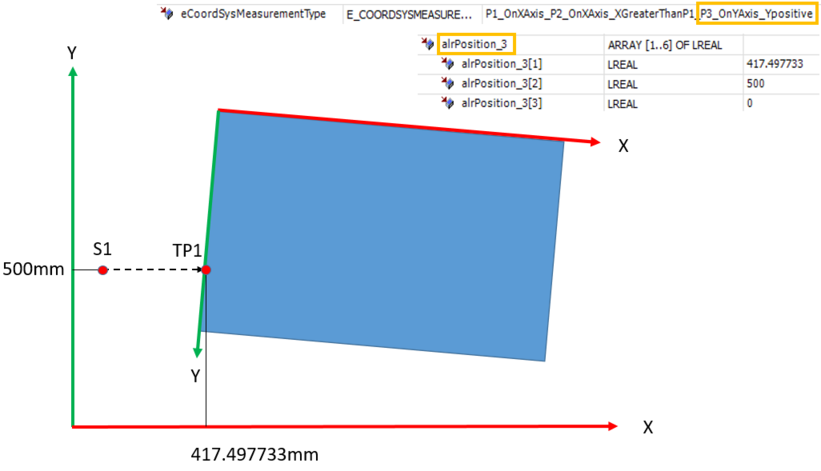
Bei diesen Punkten handelt es sich je nach eingestellter Messmethode (Eingangsvariable eCoordSysMeasurementType) entweder um...
- den Ursprung (Eingangsvariable alrPosition_1),
einen Punkt auf der positiven X-Achse (Eingangsvariable alrPosition_2) sowie
einen Punkt in der XY-Ebene mit positiver Y-Koordinate (Eingangsvariable alrPosition_3) des zu vermessenden Koordinatensystems (Messmethode P1_Origin_P2_OnXAxis_Xpositive_P3_InXYplane_Ypositive)
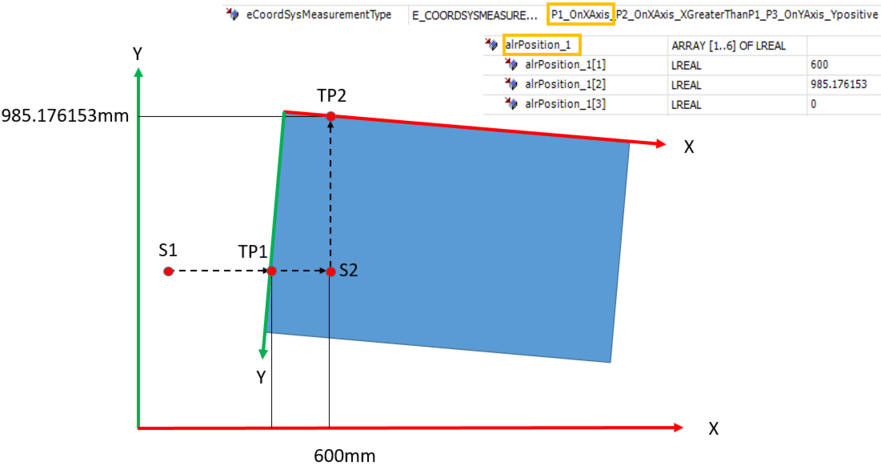
oder - einen Punkt auf der X-Achse (Eingangsvariable alrPosition_1),
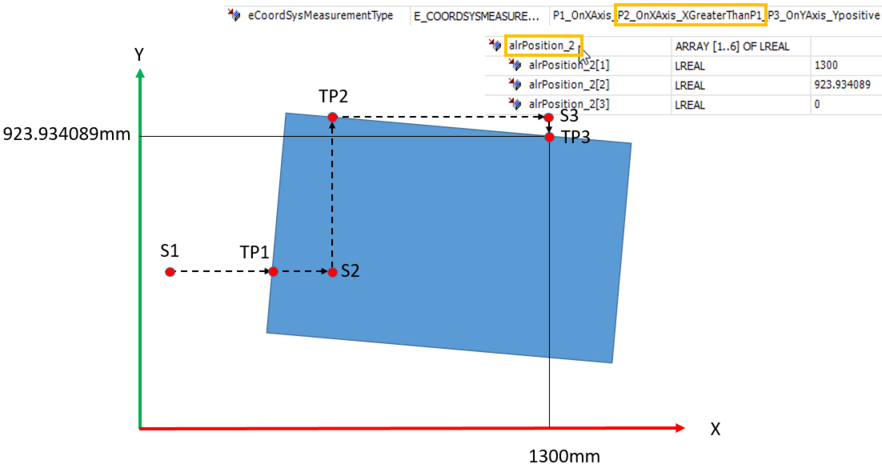
einen anderer Punkt auf der X-Achse mit größerem Wert der X-Koordinate (Eingangsvariable alrPosition_2) und
einen Punkt auf der Y-Achse mit positiver Y-Koordinate (Eingangsvariable alrPosition_3) (Messmethode P1_OnXAxis_P2_OnXAxis_XGreaterThanP1_P3_OnYAxis_Ypositive).
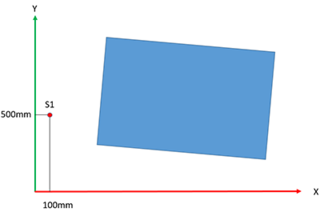
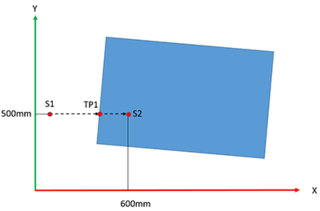
Die 3 einzugebenden Punkte können Sie z. B. dadurch bestimmen, dass Sie den TCP (z. B. mit einer Mess-Spitze) im Tippbetrieb zu den 3 Punkten verfahren oder automatisiert mittels TouchProbeMeasure ermitteln. Die Ausgangsvariable Interface_MyRobot.Basic.OUT.SetpointPose.alrBase oder die für die gemessene TouchProbe-Position parametrierte SRL-Variable Interface_MyRobot.PrgVar.astPoseValues[n] kann direkt an den Eingang Position_1/2/3 des Funktionsbausteins CoordSysMeasurement angelegt werden.
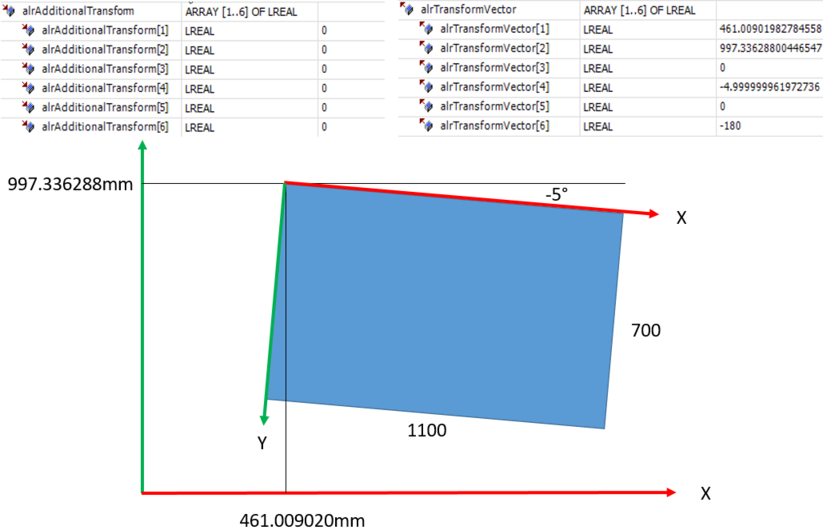
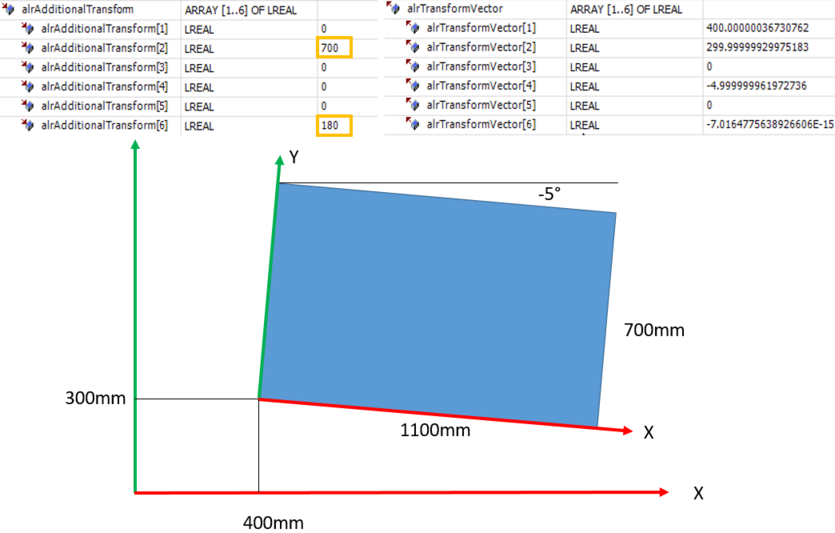
Die Transformation wird bei Aufruf der Methode CoordSysMeasurement.ComputeTransform berechnet und bei fehlerfreier Ausführung in den Ausgangsvariablen alrTransformVector sowie alrTransformFrame ausgegeben.