Beispiel
In folgendem Beispiel wird schrittweise dargestellt, wie die Lage eines Werkstücks mittels der Methode P1_OnXAxis_P2_OnXAxis_XGreaterThanP1_P3_OnYAxis_Ypositive und TouchProbe-Measure vermessen werden kann.
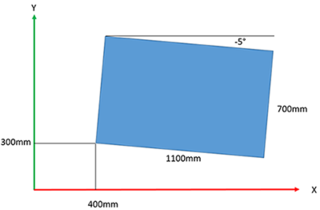
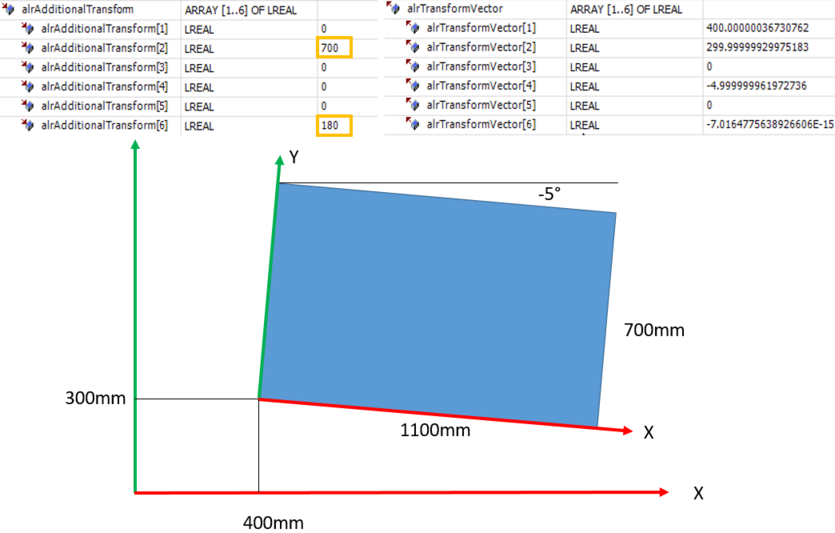
- Das Werkstück mit den Abmessungen 1100 mm x 700 mm ist -5° um die Z-Achse gegenüber dem BASE-Koordinatensystem verdreht. Der Eckpunkt links unten hat die Koordinaten X = 400 mm, Y = 300 mm

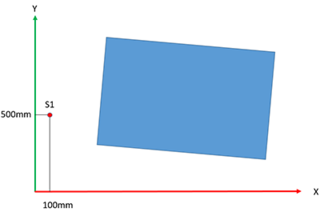
- Zunächst wird der Roboter zu einem beliebigen Startpunkt S1 links neben dem Werkstück verfahren.
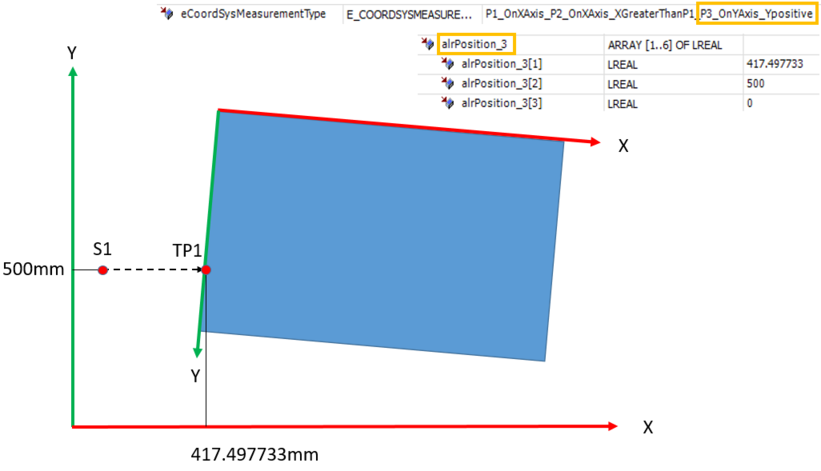
- Nun erfolgt eine Bewegung in positiver X-Richtung mit aktiviertem TouchProbe-Measure. Die TouchProbe-Position TP1 wird der Eingangsvariablen alrPosition_3 zugewiesen, da der Punkt in dem Beispiel auf der Y-Achse des zu vermessenden Koordinatensystems liegt.
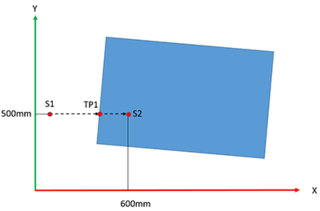
- Anschließend wird der Roboter zu einem beliebigen Punkt S2 auf dem Werkstück verfahren.
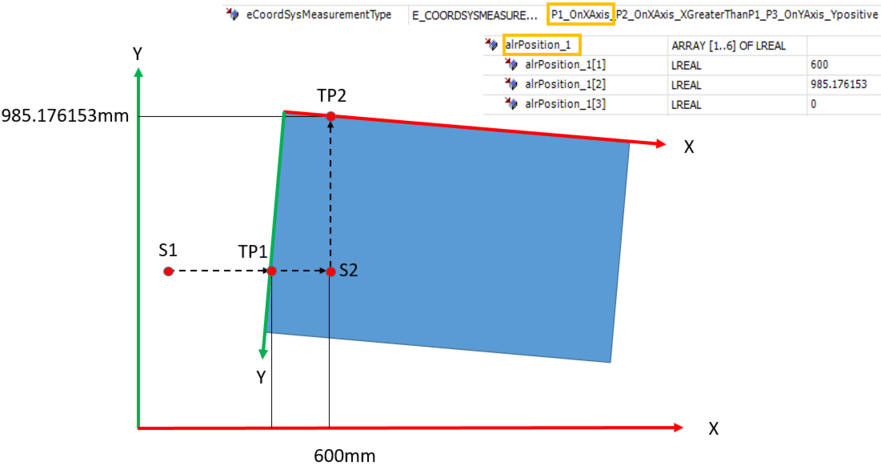
- Nun erfolgt eine Bewegung in positiver Y-Richtung mit aktiviertem TouchProbe-Measure. Die TouchProbe-Position TP2 wird der Eingangsvariablen alrPosition_1 zugewiesen, da der Punkt in dem Beispiel auf der X-Achse des zu vermessenden Koordinatensystems liegt.
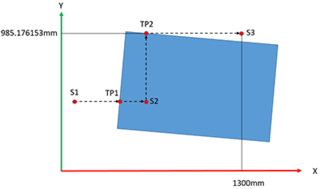
- Anschließend wird der Roboter in positiver X-Richtung zu einem beliebigen Punkt S3 oberhalb des Werkstücks verfahren.
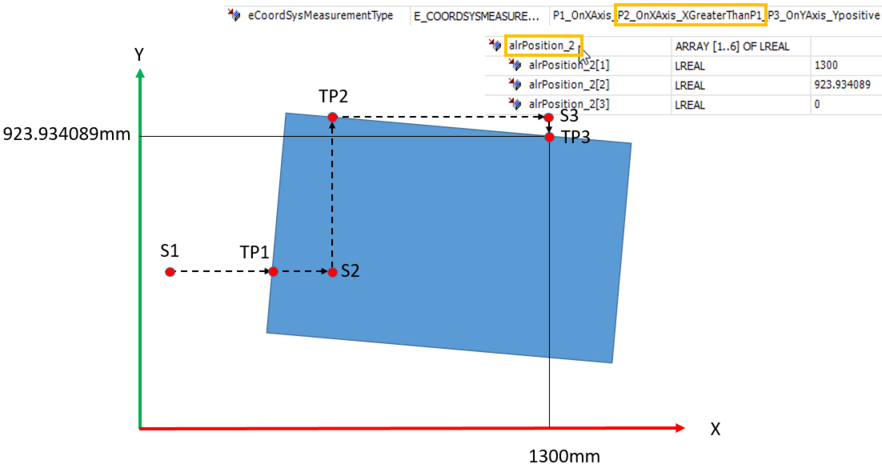
- Nun erfolgt eine Bewegung in negativer Y-Richtung mit aktiviertem TouchProbe-Measure. Die TouchProbe-Position TP3 wird der Eingangsvariablen alrPosition_2 zugewiesen, da der Punkt in dem Beispiel auf der X-Achse des zu vermessenden Koordinatensystems liegt mit größerer X-Koordinate als beim Punkt TP2. Wenn bei der Bewegung in negativer Y-Richtung kein TouchProbe-Trigger erfolgt, da das Werkstück z. B. gegen den Uhrzeigersinn um die Z-Achse gegenüber BASE verdreht ist, dann wäre in dem Beispiel eine weitere Messfahrt in positiver Y-Richtung erforderlich.
- Bei Ausführung der Methode ComputeTransform wird die Lage des zu vermessenden Koordinatensystems ausgegeben, dessen Ursprung in der Ecke oben links platziert ist. Hierbei ist die Eingangsvariable alrAdditionalTransform = (0, 0, 0, 0, 0, 0).
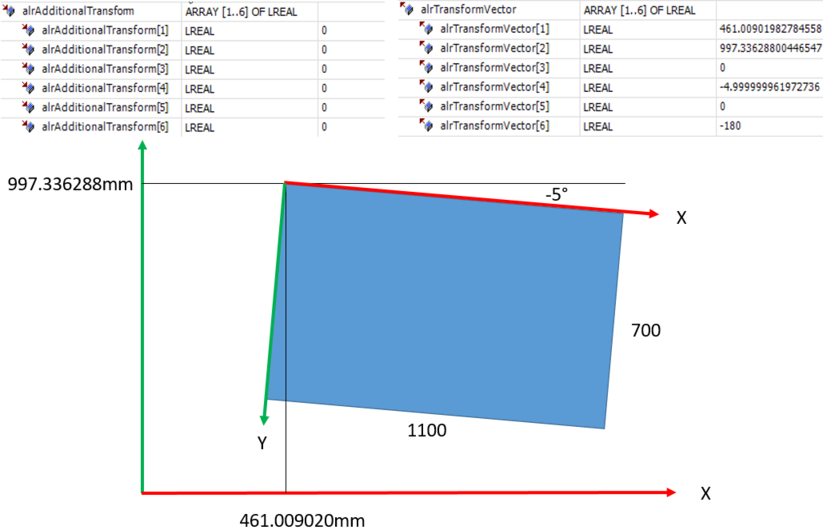
- Wenn der Ursprung des zu vermessenden Koordinatensystems z. B. in der Ecke links unten platziert sein soll, mit der Z-Achse in die gleiche Richtung zeigend wie die Z-Achse des BASE-Koordinatensystems, kann die zusätzliche Transformation alrAdditionalTransform wie abgebildet verwendet werden, so dass nun, infolge von Messungenauigkeiten gerundet, auch die Koordinaten des zu vermessenden Koordinatensystems X = 400 mm und Y = 300 mm ausgegeben werden, wie eingangs angenommen.
- Alternativ zur beschriebenen Vorgehensweise könnten z. B. auch direkt die Punkte TP2 und TP3 an der unteren Kante des Werkstücks vermessen werden, statt an der oberen Kante. Dann würde sich die zusätzliche Transformation erübrigen. Entsprechend sind auch zahlreiche andere Abläufe vorstellbar, je nach Möglichkeiten in der konkreten Applikation und der gewünschten Lage des zu vermessenden Koordinatensystems.
- Die resultierende Transformation alrTransformVector kann z. B. direkt in der Methode SetTransfom eines statischen Koordinatensystems verwendet werden:
fbStaticTransform.SetTransform(fbCoordSysMeasurement.alrTransformVector);
