运行模式概览
软件模块MOVIKIT® Velocity Drive使用转速控制操作模式 (200)。在使用MOVIKIT® Velocity Drive时无法手动激活操作模式。
MOVIKIT® Positioning Drive的操作模式及其适用范围:
操作模式 | 十进制 | 说明 |
|---|---|---|
点动 – 位置受控 | 100 | 点动模式 – 位置受控 (FCB 20) 需要编码器反馈 |
点动 – 转速受控 | 101 | 点动模式 – 转速受控 (FCB 05) 不需要编码器反馈 |
速度 | 200 | 转速控制 (FCB 05) 不需要编码器反馈 |
参考运行 – 偏移量,通过参数 | 300 | 带偏移量的参考运行,通过参数 (FCB 12) |
参考运行 - 偏移量,通过现场总线 | 301 | 带偏移量的参考运行,通过现场总线 (FCB 12) |
绝对定位
| 400 | 绝对定位 (FCB 09) |
相对定位 | 401 | 相对定位 (FCB 09) |
模数定位 – 正向 | 402 | 模数定位 – 正向 (FCB 09) |
模数定位 – 负方向 | 403 | 模数定位 – 负向 (FCB 09) |
模数定位 – 最佳方向 | 404 | 模数定位 – 最佳方向 (FCB 09) |
绝对定位 – 沿行驶方向的Touchprobe剩余行程 | 420 | Touchprobe定位 – 绝对目标位置 – 沿行驶方向的剩余行程 (FCB 09) |
绝对定位 – 带符号的Touchprobe剩余行程 | 421 | Touchprobe定位 – 绝对目标位置 – 带符号的剩余行程 (FCB 09) |
连续定位 – 沿行驶方向的Touchprobe剩余行程 | 422 | Touchprobe定位 – 连续 – 沿行驶方向的剩余行程 (FCB 09) |
连续定位 – 带符号的Touchprobe剩余行程 | 423 | Touchprobe定位 – 连续 – 带符号的剩余行程 (FCB 09) |
制动器测试 - 静态 | 700 | 制动器测试 (FCB 21) 适用于附加功能制动器测试的操作模式 |
提示
在MOVISUITE®中所进行的配置也适用于功能模块的操作。只有在软件模块配置期间在 [监控功能] > [极限值] 下设置了循环限制时,才能使用模数操作模式。
提示
停机时的行为取决于参数“停机时的行为”(索引8563.1/8564.1)中的设置。
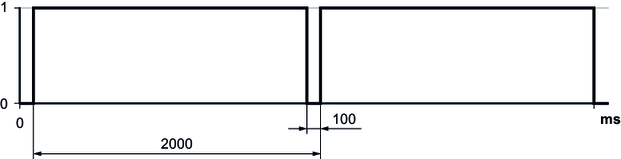
关于工作原理的介绍请参见下列关于各个操作模式的章节中的周期图以及包含有待设置信号和信号状态说明的流程。