Übersicht Betriebsarten
Das Softwaremodul MOVIKIT® Velocity Drive verwendet die Betriebsart Drehzahlregelung (200). Die Betriebsart kann beim Einsatz des MOVIKIT® Velocity Drive nicht manuell aktiviert werden.
Betriebsarten des MOVIKIT® Positioning Drive und deren Anwendungsbereiche:
Betriebsart | dezimal | Beschreibung |
|---|---|---|
Tippen - Positionsgeregelt | 100 | Tippbetrieb – Positionsgeregelt (FCB 20) Geberrückführung erforderlich |
Tippen - Drehzahlgeregelt | 101 | Tippbetrieb – Dehzahlgeregelt (FCB 05) Geberrückführung nicht erforderlich |
Geschwindigkeit | 200 | Drehzahlregelung (FCB 05) Geberrückführung nicht erforderlich |
Referenzfahrt - Offset über Parameter | 300 | Referenzieren mit Offset über Parameter (FCB 12) |
Referenzfahrt - Offset über Feldbus | 301 | Referenzieren mit Offset über Feldbus (FCB 12) |
Absolute Positionierung
| 400 | Positionieren absolut (FCB 09) |
Relative Positionierung | 401 | Positionierung relativ (FCB 09) |
Modulo-Positionierung – Positive Richtung | 402 | Positionieren Modulo – Positive Richtung (FCB 09) |
Modulo-Positionierung – Negative Richtung | 403 | Positionieren Modulo – Negative Richtung (FCB 09) |
Modulo-Positionierung – Optimierte Richtung | 404 | Positionieren Modulo – Optimierte Richtung (FCB 09) |
Positionieren absolut - Touchprobe Restweg in Fahrtrichtung | 420 | Touchprobe-Positionierung – Absolute Zielposition – Restweg in Fahrtrichtung (FCB 09) |
Positionieren absolut - Touchprobe Restweg mit Vorzeichen | 421 | Touchprobe-Positionierung –Absolute Zielposition – Restweg mit Vorzeichen (FCB 09) |
Positionieren endlos- Touchprobe Restweg in Fahrtrichtung | 422 | Touchprobe-Positionierung –Endlos – Restweg in Fahrtrichtung (FCB 09) |
Positionieren endlos - Touchprobe Restweg mit Vorzeichen | 423 | Touchprobe-Positionierung –Endlos – Restweg mit Vorzeichen (FCB 09) |
Bremsentest - Statisch | 700 | Bremsentest (FCB 21) Betriebsart für die Zusatzfunktion Bremsentest |
HINWEIS
Für den Betrieb der Funktionsbausteine gelten die in MOVISUITE® durchgeführten Konfigurationen. Die Modulo-Betriebsarten können nur verwendet werden, wenn in der Konfiguration des Softwaremoduls unter [Überwachungsfunktionen] > [Grenzwerte] eine Zyklusbegrenzung eingestellt wurde.
HINWEIS
Das Verhalten im Stillstand hängt ab von der Einstellung des Parameters "Verhalten bei Stillstand" (Index 8563.1/8564.1).
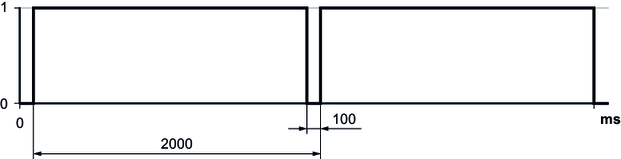
Zur Verdeutlichung der Funktionsweise finden Sie in den folgenden Kapiteln zu jeder Betriebsart ein Taktdiagramm sowie den Prozessablauf mit einer Beschreibung der zu setzenden Signale und der Signalzustände.
- Voraussetzung für Taktdiagramme
- Wechsel von Betriebsarten
- Tippbetrieb (100/101)
- Drehzahlregelung (200)
- Referenzierbetrieb (300/301)
- Positionieren - Absolut (400)
- Positionieren - Relativ (401)
- Modulo Positionierung - Positive Richtung (402)
- Modulo Positionierung - Negative Richtung (403)
- Modulo Positionierung - Optimierte Richtung (404)
- Positionieren absolut - Touchprobe Restweg in Fahrtrichtung (420)
- Positionieren absolut - Touchprobe Restweg mit Vorzeichen (421)
- Positionieren endlos - Touchprobe Restweg in Fahrtrichtung (422)
- Positionieren endlos - Touchprobe Restweg mit Vorzeichen (423)