SLP – Safely Limited Position
The SLP function prevents a movement from exceeding a specified absolute position. If the limit value of the absolute position is violated, the safety sub-function will be triggered and a fault response will be initiated (usually STO).
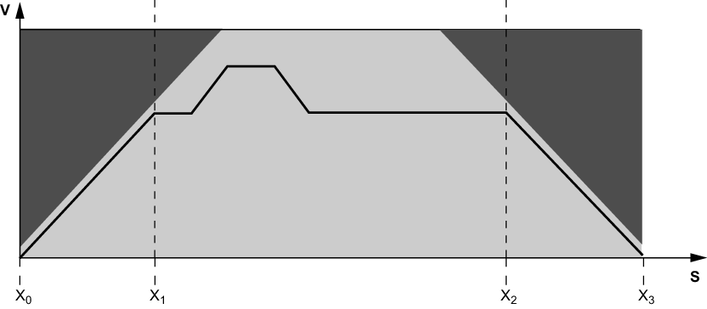
| = | Safety sub-function monitored |
| = | Safety sub-function is triggered |
v | = | Speed |
s | = | Track |
X0 | = | Minimum (lower) absolute position |
X1 | = | Position at which stopping has to be started to come to an idle state before X0. |
X2 | = | Position at which stopping has to be started to come to an idle state before X3. |
X3 | = | Maximum (upper) absolute position |
