SSR – Safe Speed Range
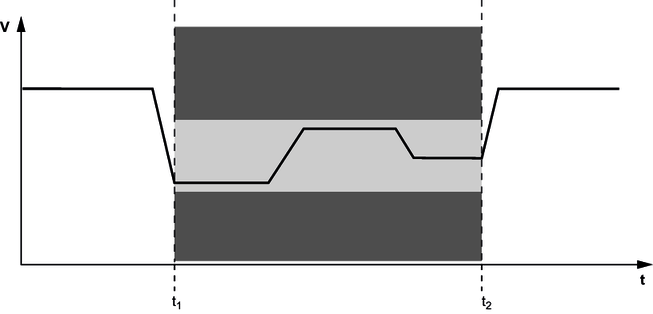
The SSR function prevents the speed of the drive from exceeding a specified range. If the permitted speed range is exceeded or is not achieved, the safety sub-function will be triggered and a fault response will be initiated at the same time.
= | Safety sub-function monitored | |
| = | Safety sub-function is triggered |
v | = | Speed |
t | = | Time |
t1 | = | Point in time when SSR is triggered. |
t2 | = | Point in time at which SSR is deactivated. |
