Direct desynchronization mechanism
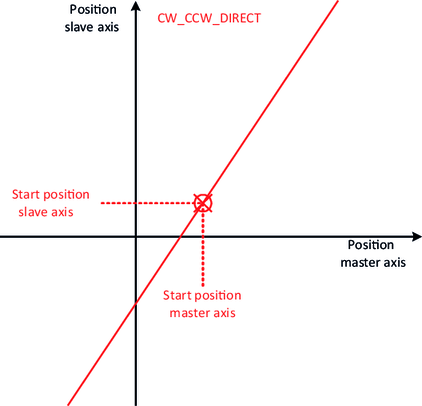
In the case of the direct desynchronization mechanism, the slave axis stops at the position it was at when there was a falling edge of the xStart start signal. The following diagram shows the relationship between the slave and master positions for eStopMode = "CW_CCW_DIRECT" without a transition.
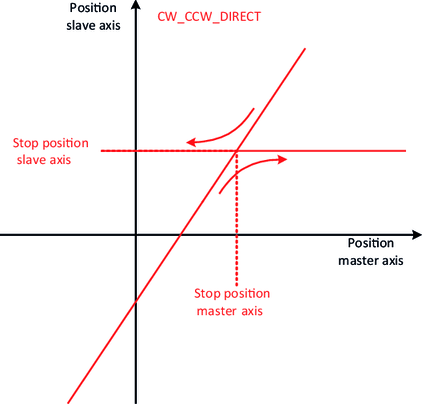
When using a master-based transition during desynchronization, the stop position of the slave axis is shifted as a function of the configured desynchronization distance lrGearOutDistance. The following diagram shows the relationship between the slave and master positions with a master-based transition for eStopMode = "CW_CCW_DIRECT".
In the case of the direct desynchronization mechanism, the desynchronization condition is met if the movement of the master matches with the configured direction of movement at the point in time of the falling edge of the xStart start signal.
During desynchronization, the following applies in particular:
- CW_DIRECT
- The desynchronization condition is met if the master is moving in a positive direction when there is a falling edge at xStart.
- CCW_DIRECT
- The desynchronization condition is met if the master is moving in a negative direction when there is a falling edge at xStart.
- CW_CCW_DIRECT
- The desynchronization condition is always met when there is a falling edge at xStart, even if the master is not moving.
If the desynchronization condition is met and a transition is required, the state at eGearingState switches to "GEAR_OUT". If no transition is required, the state switches directly to "STOPPED". If the desynchronization condition is not met, the state switches from "ACTIVE" to "WAITING_FOR_STOPPOSITION".
