Direkter Auskuppel-Mechanismus
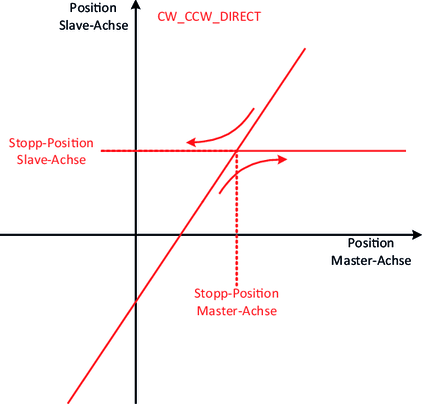
Beim direkten Auskuppel-Mechanismus stoppt die Slave-Achse an der Position, welche sie bei fallender Flanke des Start-Signals xStart hatte. Nachfolgendes Bild zeigt den Bezug zwischen Slave- und Master-Position für eStopMode = "CW_CCW_DIRECT" ohne Transition.
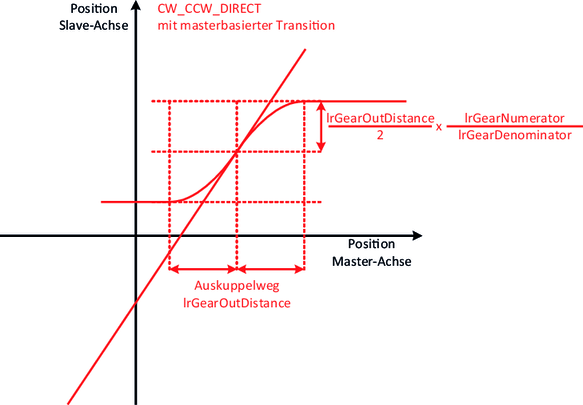
Mit Verwendung einer masterbasierten Transition beim Auskuppeln verschiebt sich die Stopp-Position der Slave-Achse in Abhängigkeit vom konfigurierten Auskuppelweg lrGearOutDistance. Nachfolgendes Bild zeigt den Bezug zwischen Slave- und Master-Position mit einer masterbasierten Transition für eStopMode = "CW_CCW_DIRECT".
Beim direkten Auskuppel-Mechanismen ist die Auskuppel-Bedingung erfüllt, wenn zum Zeitpunkt der fallenden Flanke des Start-Signals xStart die Bewegung des Masters mit der konfigurierten Bewegungsrichtung übereinstimmt.
Beim Auskuppeln gilt insbesondere:
- CW_DIRECT
- Die Auskuppel-Bedingung ist erfüllt, wenn bei fallender Flanke an xStart der Master sich in positive Richtung bewegt.
- CCW_DIRECT
- Die Auskuppel-Bedingung ist erfüllt, wenn bei fallender Flanke an xStart der Master sich in negative Richtung bewegt.
- CW_CCW_DIRECT
- Die Auskuppel-Bedingung ist bei fallender Flanke an xStart immer erfüllt, auch wenn der Master steht.
Wenn die Auskuppel-Bedingung erfüllt und eine Transition gefordert ist, wechselt der Zustand an eGearingState nach "GEAR_OUT". Wenn keine Transition gefordert ist, wechselt der Zustand direkt nach "STOPPED". Wenn die Auskuppel-Bedingung nicht erfüllt ist, wechselt der Zustand von "ACTIVE" nach "WAITING_FOR_STOPPOSITION".
