Desynchronization mechanism with stop position
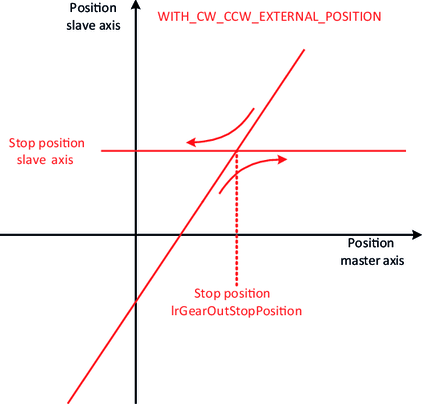
In the case of the desynchronization mechanism with a stop position, the stop position of the slave axis results from the configured stop position IrGearOutStopPosition of the master axis.
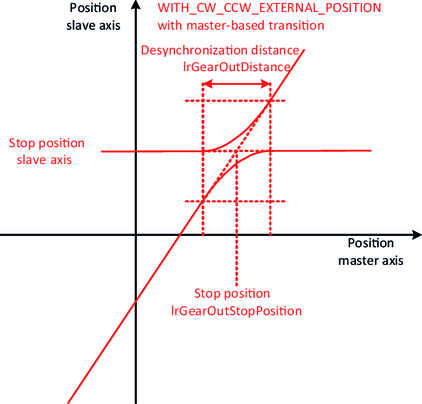
An important characteristic of this desynchronization mechanism is that the use of a transition does not change the stop position of the slave axis. A master-based transition leads to exactly the same stop position with the configured desynchronization distance lrGearOutDistance.
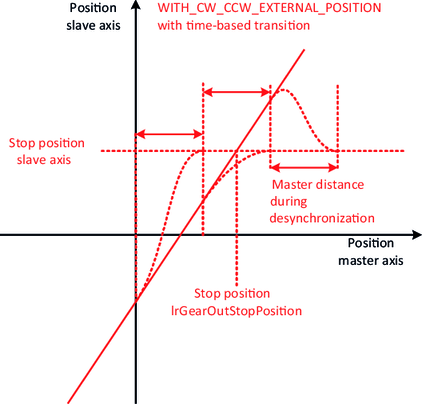
A time-based transition also leads to the same stop position, but the resulting transition depends on the boundary conditions. Depending on the state of the master axis (position, speed, acceleration) and the configured desynchronization time lrGearOutTime, the slave axis can reverse or also run oversynchronously during desynchronization. The following diagram shows three different scenarios in which the master axis is moving at a constant speed.
In the case of the desynchronization mechanism with a stop position, the slave axis should be desynchronized with reference to a defined stop position of the master axis. The desynchronization condition is therefore not met immediately in most cases when there is a falling edge on the xStart start signal. The eGearingState state therefore switches from "ACTIVE" (3) to "WAITING_FOR_STOPPOSITION" (4) during desynchronization.
During desynchronization, the following applies in particular:
- If no transition is configured, desynchronization will occur when the master axis crosses the configured stop position lrGearOutStopPosition in the configured direction. The eGearingState state switches in this moment from "WAITING_FOR_STOPPOSITION" (4) to "STOPPED" (0).
- If a master-based transition is configured, a trigger position is calculated that is positioned half a desynchronization distance lrGearOutDistance before the configured stop position lrGearOutStopPosition. Desynchronization begins when the master axis crosses the calculated trigger position in the configured direction. The eGearingState state switches in this moment from "WAITING_FOR_STOPPOSITION" (4) to "GEAR_OUT" (5).
- If a time-based transition is configured, desynchronization begins immediately when the master axis moves in the configured direction. The eGearingState state then switches immediately from "ACTIVE" (3) to "GEAR_OUT" (5).
