Auskuppel-Mechanismus mit Stopp-Position
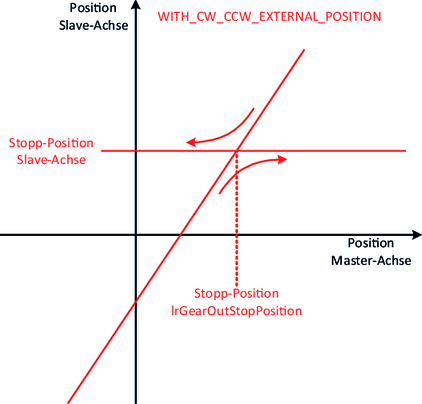
Beim Auskuppel-Mechanismus mit Stopp-Position ergibt sich die Stopp-Position der Slave-Achse aus der konfigurierten Stopp-Position lrGearOutStopPosition der Master-Achse.
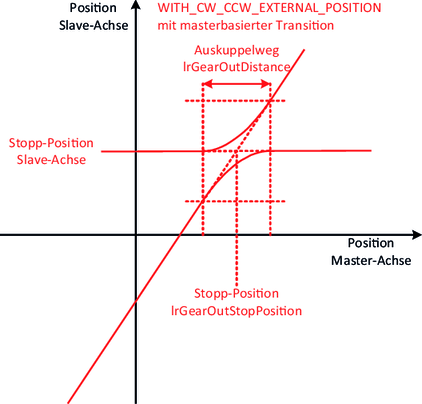
Eine wichtige Eigenschaft dieses Auskuppel-Mechanismus ist, dass die Verwendung einer Transition die Stopp-Position der Slave-Achse nicht verändert. Ein masterbasierte Transition führt mit dem konfigurierten Auskuppelweg lrGearOutDistance auf genau dieselbe Stopp-Position.
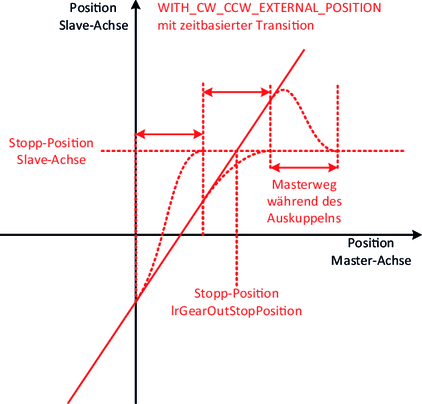
Eine zeitbasierte Transition führt ebenfalls auf dieselbe Stopp-Position, allerdings hängt die resultierende Transition von den Randbedingungen ab. Je nach Zustand der Master-Achse (Position, Geschwindigkeit, Beschleunigung) und je nach konfigurierter Auskuppel-Zeit lrGearoutTime kann die Slave-Achse beim Auskuppeln reversieren oder auch übersynchron verfahren. In nachfolgendem Bild sind drei verschiedene Szenarien bei Bewegung der Master-Achse mit konstanter Geschwindigkeit zu sehen.
Beim Auskuppel-Mechanismus mit Stopp-Position soll das Absynchronisieren der Slave-Achse mit Bezug zu einer definierten Stopp-Position der Master-Achse erfolgen. Daher ist in den meisten Fällen die Auskuppel-Bedingung bei fallender Flanke am Start-Signal xStart nicht sofort erfüllt. Beim Auskuppeln wechselt der Zustand eGearingState von "ACTIVE" (3) nach "WAITING_FOR_STOPPOSITION" (4).
Beim Auskuppeln gilt insbesondere:
- Wenn keine Transition konfiguriert ist, erfolgt das Absynchronisieren, wenn die Master-Achse die konfigurierte Stopp-Position lrGearOutStopPosition in der konfigurierten Richtung überfährt. Der Zustand eGearingState wechselt in diesem Moment von "WAITING_FOR_STOPPOSITION" (4) nach "STOPPED" (0).
- Wenn eine masterbasierte Transition konfiguriert ist, wird eine Trigger-Position berechnet, die einen halben Auskuppelweg lrGearOutDistance vor der konfigurierten Stopp-Position lrGearOutStopPosition liegt. Das Absynchronisieren beginnt dann, wenn die Master-Achse die berechnete Trigger-Position in der konfigurierten Richtung überfährt. Der Zustand eGearingState wechselt in diesem Moment von "WAITING_FOR_STOPPOSITION" (4) nach "GEAR_OUT" (5).
- Wenn eine zeitbasierte Transition konfiguriert ist, beginnt das Absynchronisieren sofort, wenn die Master-Achse sich in die konfigurierte Richtung bewegt. Der Zustand eGearingState wechselt dann sofort von "ACTIVE" (3) nach "GEAR_OUT" (5).
