Application example
The following application illustration shows an example setup for "Skew priority" operating mode:
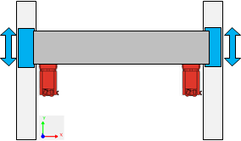
One vehicle is moved by 2 drives that are connected to the vehicle via drive suspension. Sliding rails provide a rigid connection between the drives. To establish a fixed reference between the drive position and its surroundings, the sliding rails are designed in the form of a toothed rail or equipped with an external encoder. In such structures, skews or misalignments between axis group members may cause damage. This is why the position between the A-side and the B-side needs to be level. In "Skew priority" operating mode, the software module compensates for positional differences (e.g. due to drive overload, slipping of a drive, freewheel of a drive, etc.) by using a configurable compensation movement.
