Operating modes
To meet the requirements of the different applications, the software module offers several operating modes. The operating modes differ in whether priority for balancing the axis group members is placed on skewing or on the torque. These operating modes cannot be combined.
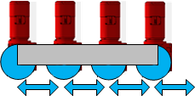
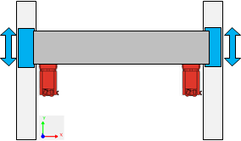
Frictional connections (e.g. vehicles) are preferably operated using "Torque priority" operating mode. For positive connections, the operating mode depends on the mechanical connection.
The following functions are available across all operating modes:
- Central control, referencing, and troubleshooting of an axis group
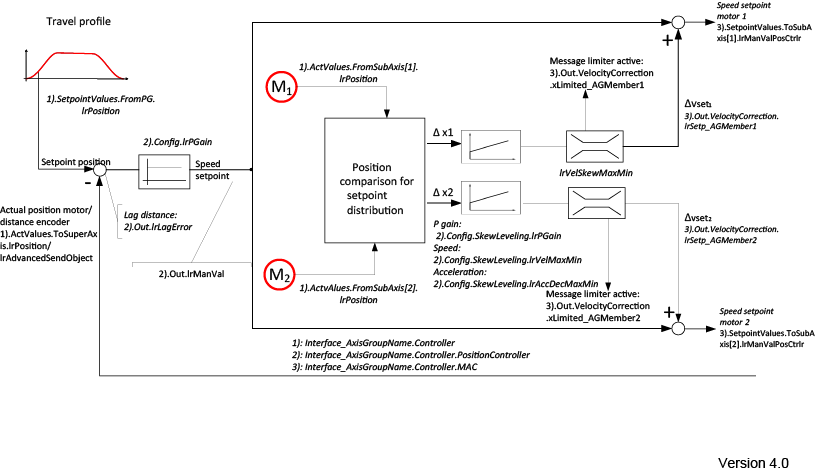
- Central position control (slip compensation also possible via an external encoder)
- Use of a virtual master
- Support for MultiMotion functions (e.g. positioning and speed control)