Overview
Observe the following information on communication:
- Communication occurs via the I/O area.
- The most important data from the object list is mapped in the I/O area. See chapter OSS21C function module for further information.
- You can access the unmapped objects via the acyclical channel.
- Referencing can only be started from the "PtP position profile" operating mode.
- The target position T is the maximum travel position for the referencing. This must be indicated with a positive/negative sign.
- Referencing is carried out with the following steps:
- The higher speed V1 is used to move toward the target position T until the reference switch R is passed.
- The vehicle then decelerates and travels in the opposite direction at speed V1.
- When the reference switch R is passed again, the system decelerates again and travels in the opposite direction at slow speed V2.
- The next time the reference switch is passed, the reference position R is set and approached at speed V2.
- Use one of the digital inputs of the function module to connect the reference switch and specify the polarity of the switch during parameterization.
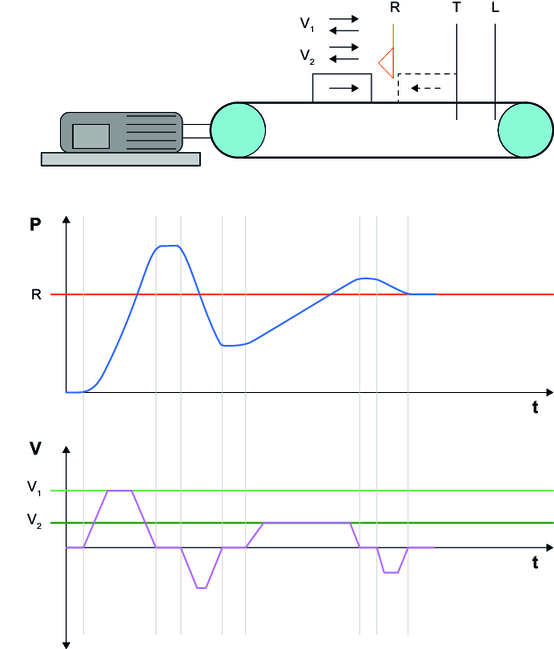
V1 | High speed |
V2 | Slow speed |
R | Reference switch and/or reference value |
T | Target position |
L | General position limit |
