Path
The SRL program specifies the path of the tool to be used by the robot. The path is set up by a series of path points. For example, a path in which the system stops at each path point may look like the one below using 4 path points.
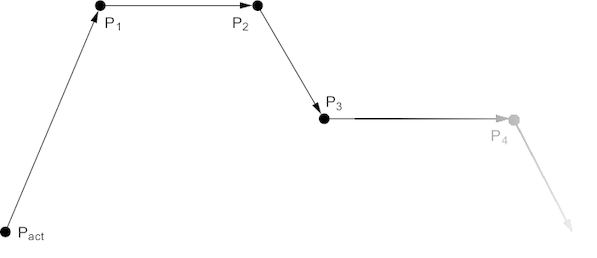
Pact | Path point, actual |
P1 – 4 | Path points 1 to 4 |
The segment of motion from one path point to the next is called the path segment.
INFORMATION

