Coordinate systems
The pose of the robot can be specified via different coordinate systems. Depending on the position of the coordinate system, the coordinates of a pose are different for each coordinate system. MOVIKIT® Robotics has the following coordinate systems:
- Base
- A coordinate system that is generally fixed rigidly in the base of the kinematic model. This system is used as a reference coordinate system for direct kinematic transformation (transformation of the joint axis values into Cartesian values of the tool).
- Joint
- A coordinate system in which each coordinate corresponds to one joint axis of the kinematic model.
- User
- Coordinate system that refers to base in the latest software version. The coordinate system can be static or moving.
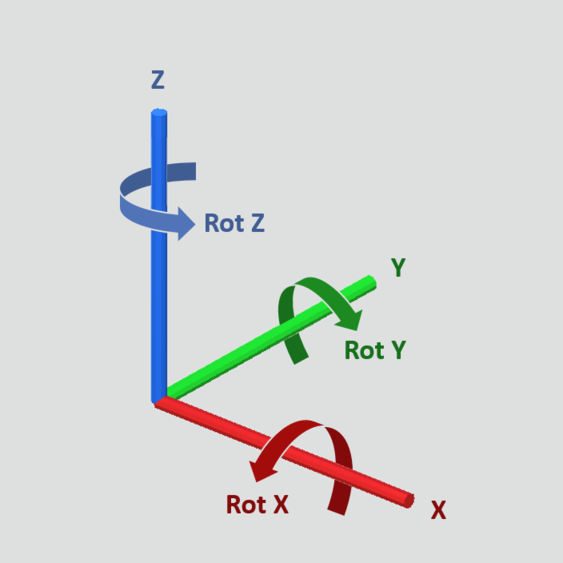
These are right-handed, Cartesian coordinate systems. The X-axis is colored red, the Y-axis green and the Z-axis blue. Rotations around these axes are usually performed according to the right-hand rule or in the mathematical positive direction of rotation.
|