Motion control
Additional information
Interpolation
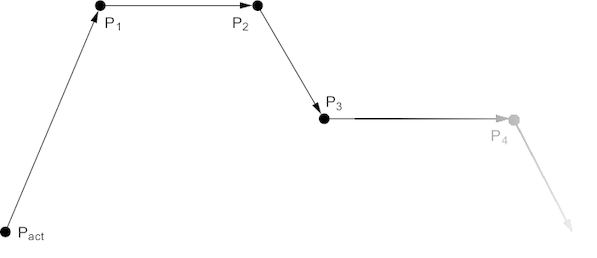
Path
Blending
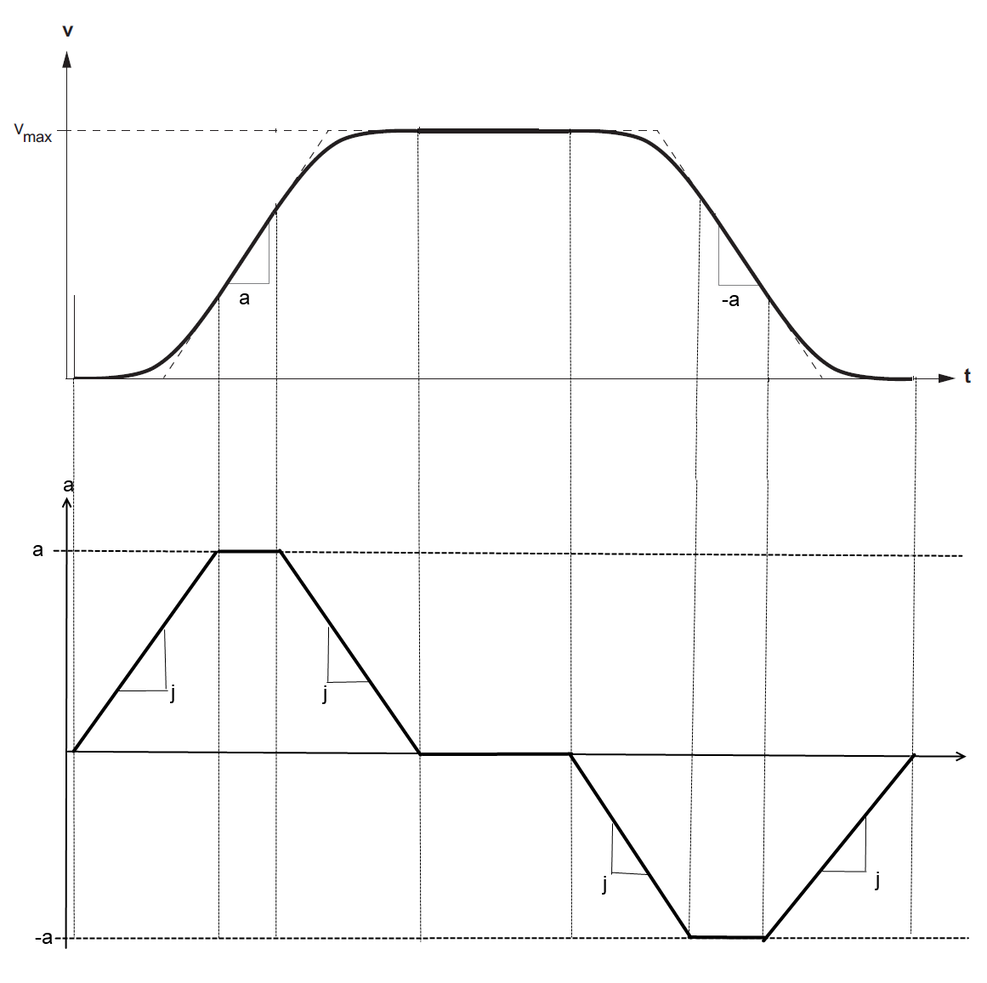
Motion profiles
Scaling using override
Default units
Emergency stop
Path events
Touchprobe
Tangential control
❮
❯
MOVIKIT® Robotics
Language
Deutsch
English
SEW-EURODRIVE
Home
Basics
Motion control