Motion profiles
Any motion along an axis or around an axis (joint axis, Cartesian axis, or path axis) requires a defined motion profile. The following figure shows which parameters you can use to define the motion profile when using this software module.
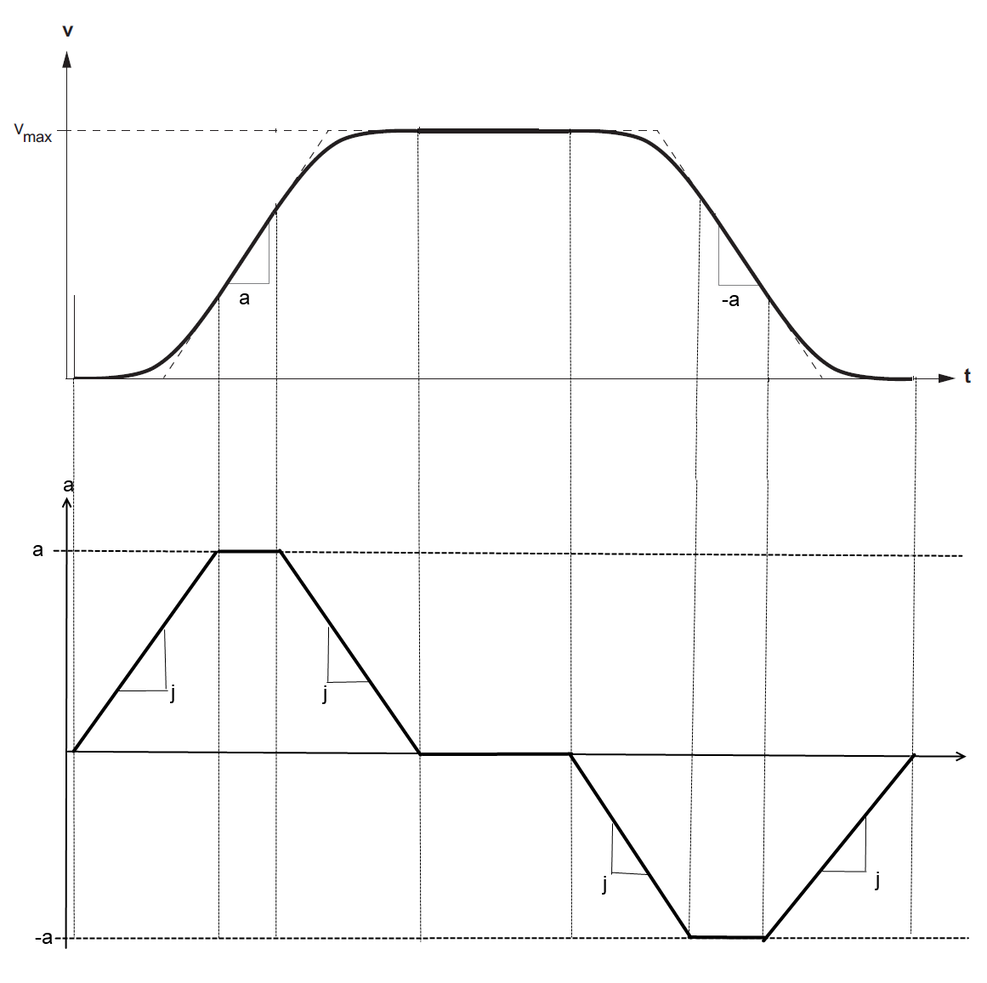
vmax | Maximum permitted speed for the motion task | ||
a | Maximum permitted acceleration for the motion task | ||
y | Jerk (rate of change of acceleration) | ||
vmax is not reached in the following cases (no constant travel):
- a is extremely low compared to vmax
- j is extremely low compared to a
- The distance to be covered is extremely short
In these cases, the travel diagram above is simplified to a jerk-limited triangular profile. Accordingly, it is also possible that acceleration or deceleration will not be achieved (no section with constant acceleration).
INFORMATION

