Bahn
Das SRL-Programm gibt dem Roboter die Bahn des Werkzeugs vor. Die Bahn wird durch eine Folge von Bahnpunkten aufgespannt. Eine Bahn, bei der bei jedem Bahnpunkt angehalten wird, kann mit 4 Bahnpunkten beispielsweise wie folgt aussehen.
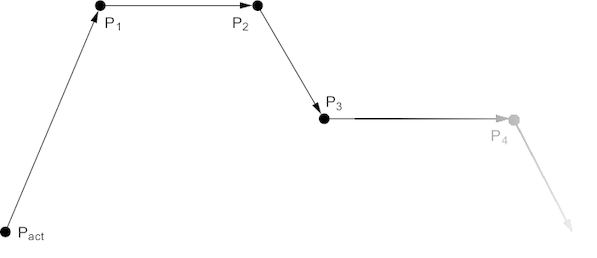
Pact | Bahnpunkt aktuell |
P1 – 4 | Bahnpunkte 1 – 4 |
Der Bewegungsabschnitt von einem Bahnpunkt zum Nächsten wird als Bahnsegment bezeichnet.
HINWEIS

