Fonctions en cas de pilotage par RS485
En cas de pilotage via RS485, le déblocage du frein est effectué par pilotage dans le mot de commande.
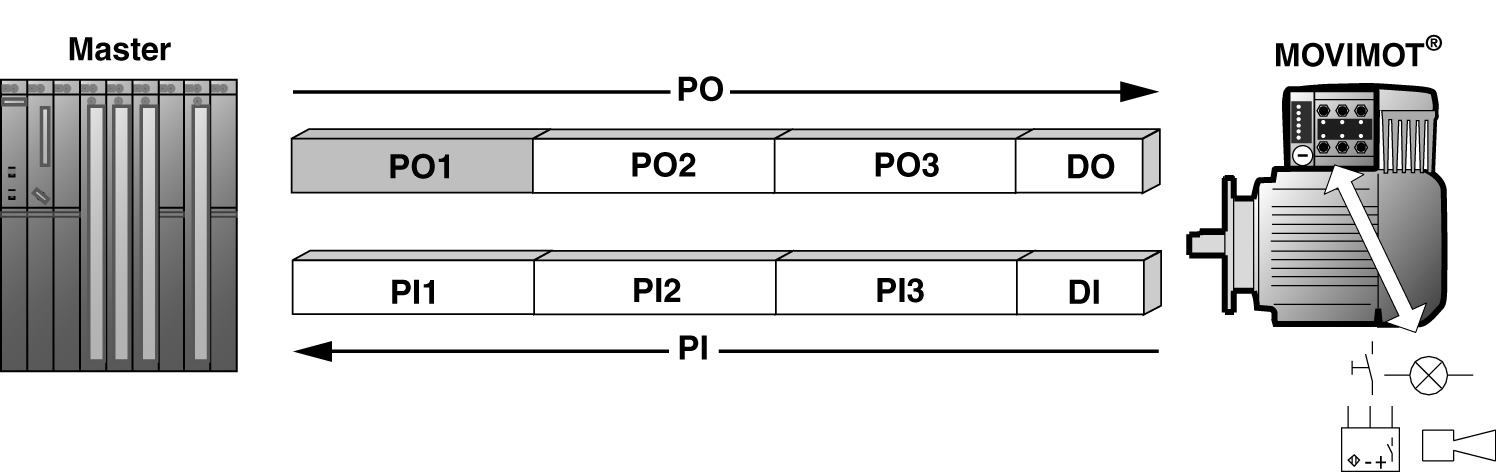
PO | = Données sortie process | PI | = Données entrée process | |
SP1 | = Mot de commande | EP1 | = Mot d'état 1 | |
SP2 | = Vitesse [%] | EP2 | = Courant de sortie | |
SP3 | = Rampe | EP3 | = Mot d'état 2 | |
DO | = Sorties binaires | DI | = Entrées binaires |
Le frein peut être débloqué en forçant à "1" le bit 8 du mot de commande si les conditions suivantes sont remplies.

1) Recommandation pour tous les bits non affectés = "0" |
État de libération | État de défaut | Bits d'état 8 | Commande du frein |
|---|---|---|---|
Appareil | Pas de défaut de l'appareil / pas de time out communication | "0" | Le variateur MOVIMOT® pilote le frein. |
Appareil | Pas de défaut de l'appareil / pas de time out communication | "1" | Le variateur MOVIMOT® pilote le frein. |
Appareil non libéré | Pas de défaut de l'appareil / pas de time out communication | "0" | Le frein est serré. |
Appareil | Pas de défaut de l'appareil / pas de time out communication | "1" | Le frein est est débloqué pour procédé manuel. |
Appareil non libéré | Défaut de l'appareil / time out communication | "1" ou "0" | Le frein est serré. |
