Functions with control via RS485
With control via RS485, the brake is released via the control word:
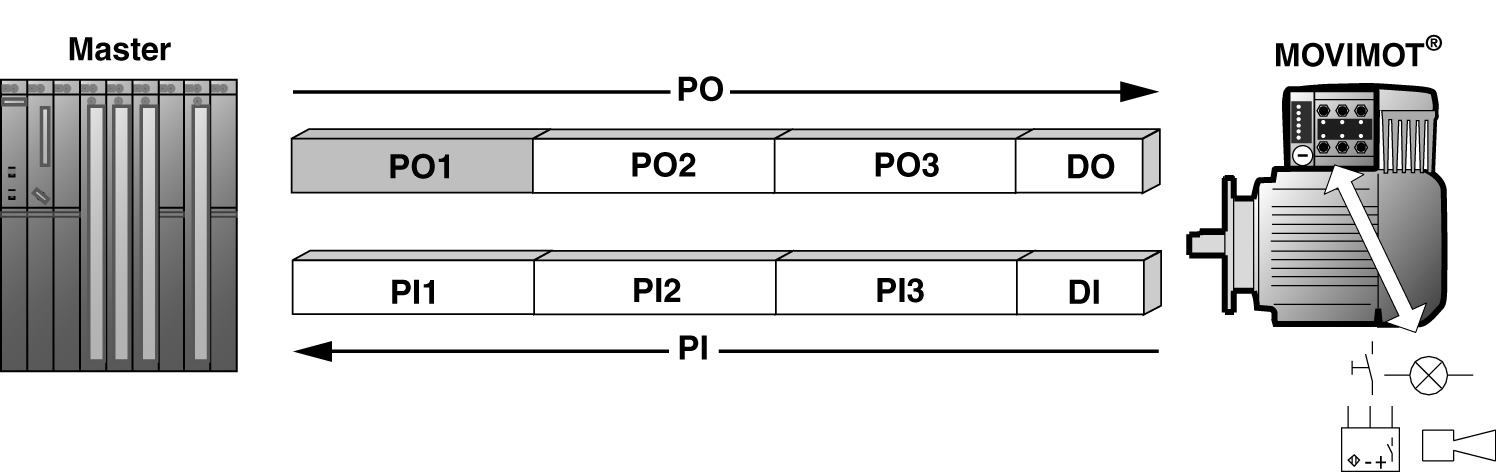
PO | = Process output data | PI | = Process input data | |
PO1 | = Control word | PI1 | = Status word 1 | |
PO2 | = Speed [%] | PI2 | = Output current | |
PO3 | = Ramp | PI3 | = Status word 2 | |
DO | = Binary outputs | DI | = Binary inputs |
By setting bit 8 in the control word, the brake can be released if the following conditions are met:

1) Recommendation for all bits that are not assigned = "0" |
Enable state | Fault status | Status of bit 8 | Brake function |
|---|---|---|---|
Device | No unit error/ | "0" | The MOVIMOT® inverter controls the brake. |
Device | No unit error/ | "1" | The MOVIMOT® inverter controls the brake. |
Unit | No unit error/ | "0" | Brake is applied. |
Unit | No unit error/ | "1" | Brake is released for manual movement. |
Unit | Unit error/ | "1" or "0" | Brake is applied. |
