Funktionen bei Steuerung über RS485
Bei Steuerung über RS485 erfolgt das Öffnen der Bremse durch Ansteuerung im Steuerwort:
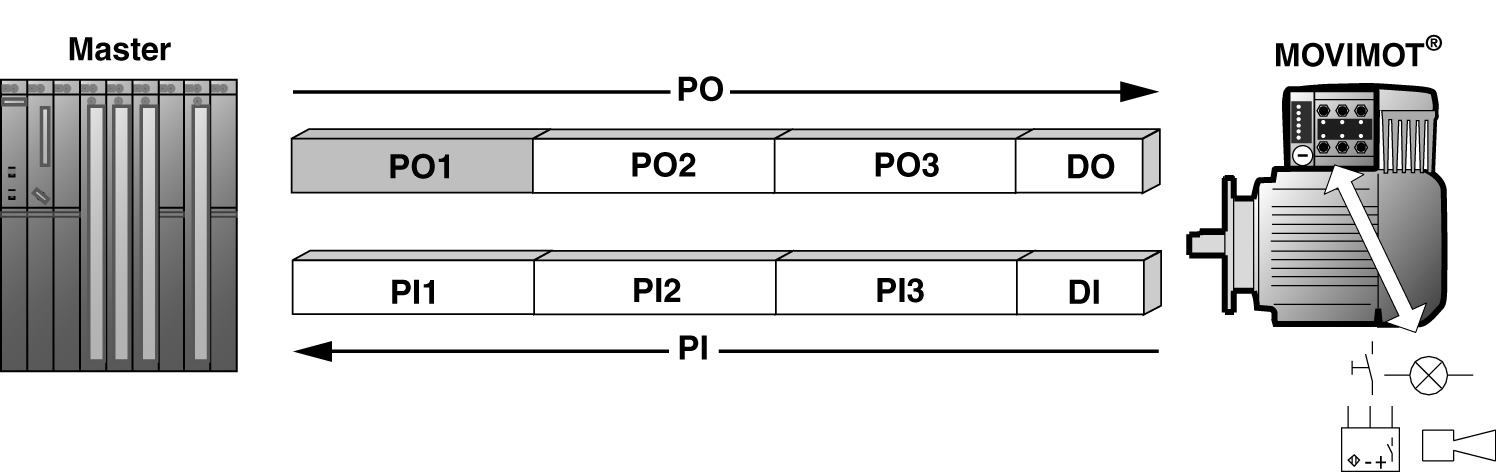
PO | = Prozessausgangsdaten | PI | = Prozesseingangsdaten | |
PO1 | = Steuerwort | PI1 | = Statuswort 1 | |
PO2 | = Drehzahl [%] | PI2 | = Ausgangsstrom | |
PO3 | = Rampe | PI3 | = Statuswort 2 | |
DO | = Binäre Ausgänge | DI | = Binäre Eingänge |
Durch das Setzen von Bit 8 im Steuerwort können Sie die Bremse unter folgenden Voraussetzungen lüften:

1) Empfehlung für alle nicht belegten Bits = "0" |
Freigabezustand | Fehlerzustand | Statusbits 8 | Bremsenfunktion |
|---|---|---|---|
Gerät | Kein Gerätefehler/ | "0" | Der MOVIMOT®-Umrichter steuert die Bremse. |
Gerät | Kein Gerätefehler/ | "1" | Der MOVIMOT®-Umrichter steuert die Bremse. |
Gerät | Kein Gerätefehler/ | "0" | Die Bremse ist geschlossen. |
Gerät | Kein Gerätefehler/ | "1" | Die Bremse wird zum manuellen Verfahren geöffnet. |
Gerät | Gerätefehler/ | "1" oder "0" | Die Bremse ist geschlossen. |
