通过RS485控制时的功能
通过RS485控制时,制动器根据控制字中的控制信息释放:
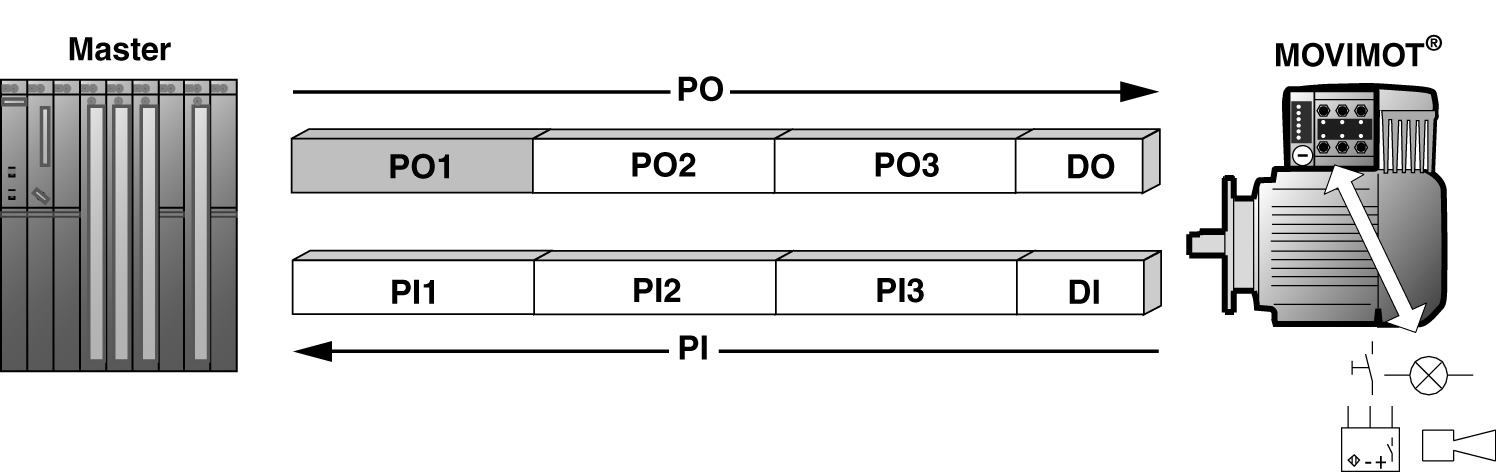
PO | = 过程输出数据 | PI | = 过程输入数据 | |
PO1 | = 控制字 | PI1 | = 状态字1 | |
PO2 | = 转速 [%] | PI2 | = 输出电流 | |
PO3 | = 斜坡 | PI3 | = 状态字2 | |
DO | = 二进制输出端 | DI | = 二进制输入端 |
通过对控制字中第8位的设置,可以在满足下列前提条件情况下释放制动器:

1) 建议将所有无配置的位设为“0” |
使能状态 | 故障状态 | 控制字中的 | 制动功能 |
|---|---|---|---|
设备 | 无设备故障/ | “0” | MOVIMOT®变频器控制制动器。 |
设备 | 无设备故障/ | “1” | MOVIMOT®变频器控制制动器。 |
设备 | 无设备故障/ | “0” | 制动器已闭合。 |
设备 | 无设备故障/ | “1” | 制动器为进行手动位移而释放。 |
设备 | 有设备故障/ | “1”或“0” | 制动器已闭合。 |
