Funções com controle via RS485
Em caso de controle via RS485, o desbloqueio do freio se dá através do controle na palavra de comando:
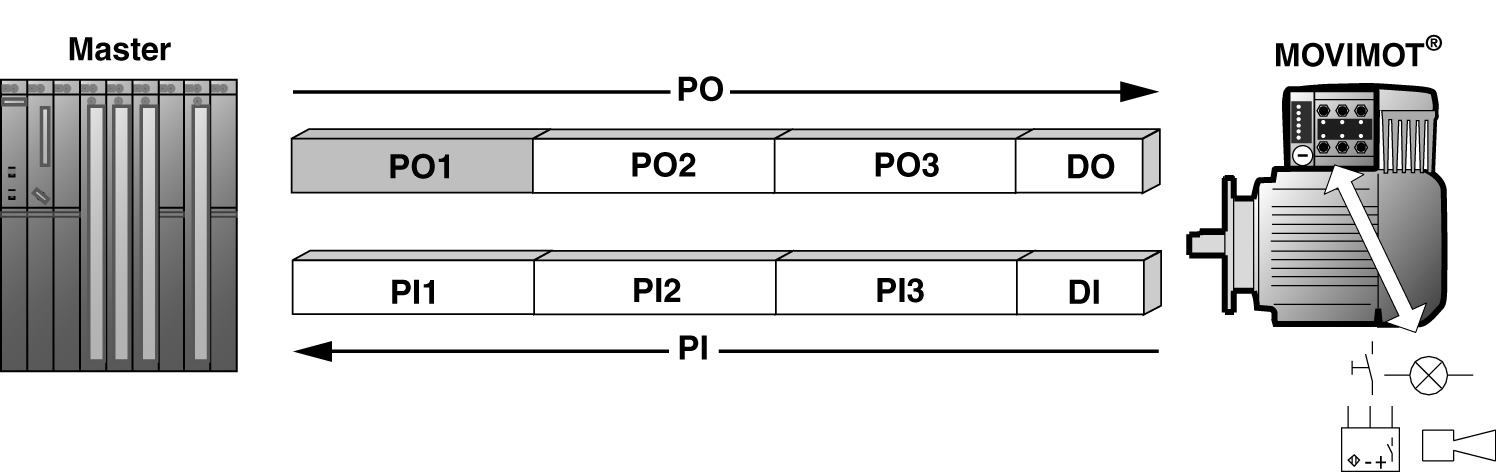
PO | = Dados de saída de processo | PI | = Dados de entrada de processo | |
PO1 | = Palavra de comando | PI1 | = Palavra de estado 1 | |
PO2 | = Rotação [%] | PI2 | = Corrente de saída | |
PO3 | = Rampa | PI3 | = Palavra de estado 2 | |
DO | = Saídas digitais | DI | = Entradas digitais |
Colocando o bit 8 na palavra de comando permite que o freio seja liberado sob as seguintes condições:

1) Recomendação para todos os bits não utilizados = "0" |
Estado de liberação | Estado da irregularidade | Bit de status 8 | Função do freio |
|---|---|---|---|
Unidade | Nenhuma irregularidade na unidade/ | "0" | O conversor MOVIMOT® controla o freio. |
Unidade | Nenhuma irregularidade na unidade/ | "1" | O conversor MOVIMOT® controla o freio. |
Unidade | Nenhuma irregularidade na unidade/ | "0" | O freio está fechado |
Unidade | Nenhuma irregularidade na unidade/ | "1" | O freio é desbloqueado para ação manual. |
Unidade | Irregularidade na unidade/ | "1" ou "0" | O freio está fechado |
