Filtro de velocidade
O filtro de velocidade pode ser parametrizado para a função SLS, SSM e SSR. O filtro de velocidade permite que a velocidade limite seja ultrapassada "brevemente" sem desencadear a resposta a irregularidade. O filtro de velocidade é ativado quando o filtro é > "0".
Esta funcionalidade adicional permite filtrar os picos de velocidade em caso de operação irregular (picos de velocidade no sinal). Com base na diferença entre a velocidade atual e o valor de monitoração de velocidade parametrizado, a integral do caminho é calculada e comparada com o valor inserido. Se o valor inserido for excedido, a função do componente de segurança é desarmada e o status da subfunção de segurança muda de "1" para "0".
O gráfico a seguir mostra um exemplo do filtro de velocidade:
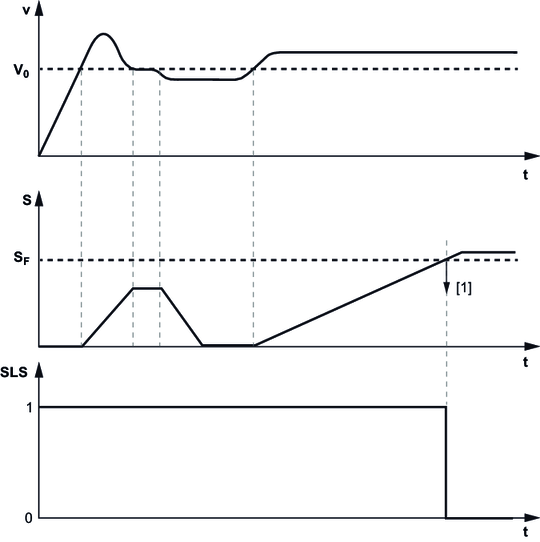
[1] | Resposta |
Um acionamento excede o limite "v0" parametrizado na função do componente de segurança SLS. Quando o limite "v0" é excedido, a velocidade acima do limite é integrada (S). Se a velocidade atual voltar a um valor abaixo do limite parametrizado "v0", a integral também diminui novamente até "0". No curso seguinte, a velocidade aumenta novamente e permanece acima do limite parametrizado "v0". Como consequência, quando o valor do filtro (SF) é excedido, a integral também aumenta novamente e aciona a resposta correspondente [1] (aqui: função do componente de segurança SLS). O status muda de "1" para "0". É possível registrar o curso do valor da irregularidade no Scope.
- Filtro de velocidade SLS 8706.25 (Offset 0 – 3)
- Filtro de velocidade SSM 8706.31 (Offset 0 – 1)
- Filtro de velocidade SSR 8706.56 (Offset 0 – 1)
Para a colocação em operação inicial do filtro de velocidade, faz sentido registrar a curva de velocidade através do Scope. É possível usar esse valor máximo como valor de filtro para o filtro de velocidade como uma primeira aproximação, levando em consideração qualquer tolerância.
