速度滤波器
速度滤波器可通过SLS、SSM和SSR功能进行参数设定。通过速度滤波器,可以“短暂地”超过极限速度而不触发故障反应。当滤波器 > “0”时,速度滤波器激活。
通过这一附加功能,可以过滤运行不平稳时的速度峰值(信号中的速度峰值)。根据当前速度和参数设定的速度监控值之间的差值,计算行程积分,并与输入的值进行比较。如果超出输入的值,则触发安全子功能,安全子功能的状态从“1”变为“0”。
下图为速度过滤器的示例:
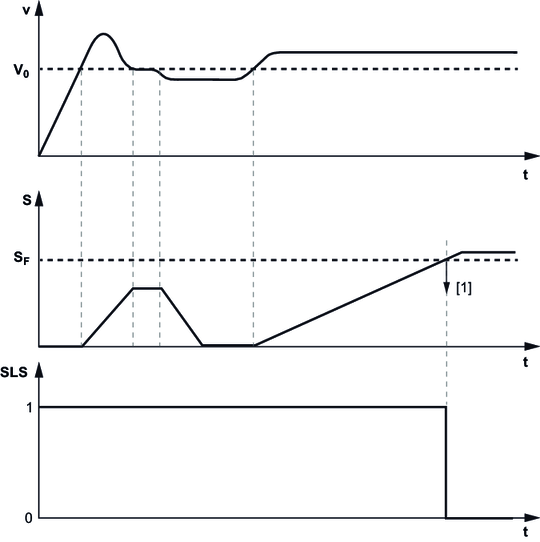
[1] | 反应 |
驱动装置超出在安全子功能SLS中经参数设定的阈值“v0”。当超过阈值“v0”时,对高于阈值的速度进行求积分运算 (S)。如果当前速度变回低于经参数设定的阈值“v0”的值,则积分也会再次向“0”减小。在接下来的过程中,速度再次上升,并保持在参数设定的阈值“v0”以上。因此,积分也会再次增加并在超过滤波器值 (S滤波器) 时,触发相应的反应 [1](此处:安全子功能SLS)。状态从“1”变为“0”。故障值的走向可记录在Scope中。
- SLS速度滤波器8706.25(偏移量0 ~ 3)
- SSM速度滤波器8706.31(偏移量0 ~ 1)
- SSR速度滤波器8706.56(偏移量0 ~ 1)
在首次调试速度滤波器时,有必要通过Scope记录速度曲线。您可在第一次近似计算中使用该最大值作为速度滤波器的滤波器值,同时考虑到可能存在的公差。
