Filtre de vitesse
Le filtre de vitesse peut être paramétré pour les fonctions SLS, SSM et SSR. Le filtre de vitesse permet de dépasser la vitesse limite durant une courte période sans déclencher de réaction au défaut. Le filtre de vitesse est activé lorsque le filtre > "0".
Cette fonctionnalité supplémentaire permet de filtrer les pics de vitesse en cas de déplacement irrégulier (pics de vitesse du signal). En partant de la différence entre la vitesse actuelle et la valeur de surveillance de la vitesse paramétrée, l'intégrale de distance est calculée et comparée à la valeur indiquée. Si la valeur indiquée est dépassée, la sous-fonction de sécurité déclenche et l'état de la sous-fonction de sécurité passe de "1" à "0".
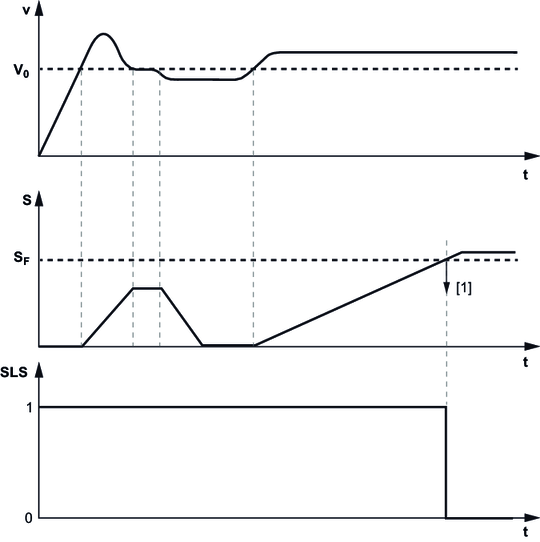
Le graphique suivant montre, à titre d'exemple, un filtre de vitesse.
[1] | Réaction |
Un entraînement dépasse le seuil "v0" paramétré dans la sous-fonction de sécurité SLS. En dépassant le seuil "v0", la vitesse se situant au-dessus du seuil est intégrée (S). Si la vitesse actuelle est à nouveau modifiée et repasse à une valeur inférieure au seuil "v0" paramétré, l'intégrale redescend également à "0". La vitesse remonte ensuite et reste au-dessus du seuil "v0" paramétré. Par conséquent, l'intégrale remonte également et déclenche la réaction correspondante [1] (ici : sous-fonction de sécurité SLS) en cas de dépassement de la valeur filtre (SF). L'état passe de "1" à "0". La courbe de la valeur de défaut peut être enregistrée dans Scope.
- Filtre de vitesse SLS 8706.25 (offset 0 – 3)
- Filtre de vitesse SSM 8706.31 (offset 0 – 1)
- Filtre de vitesse SSR 8706.56 (offset 0 – 1)
Pour la première mise en service du filtre de vitesse, il est recommandé d'enregistrer la courbe de vitesse via Scope. Cette valeur maximale peut être utilisée en première approximation en tenant compte des éventuelles tolérances pour le filtre de vitesse.
