Filtro de velocidad
El filtro de velocidad se puede parametrizar con la función SLS, SSM y SSR. El filtro de velocidad permite sobrepasar la velocidad límite "brevemente" sin provocar una respuesta en caso de fallo. El filtro de velocidad está activado cuando el filtro es > "0".
Esta funcionalidad adicional permite filtrar los picos de velocidad durante el movimiento irregular (picos de velocidad en la señal). A partir de la diferencia entre la velocidad actual y el valor de vigilancia de velocidad parametrizado, se calcula la integral de la trayectoria y se compara con el valor introducido. Si se supera el valor introducido, la función parcial de seguridad se activa y el estado de esta cambia de "1" a "0".
El siguiente gráfico muestra un ejemplo del filtro de velocidad:
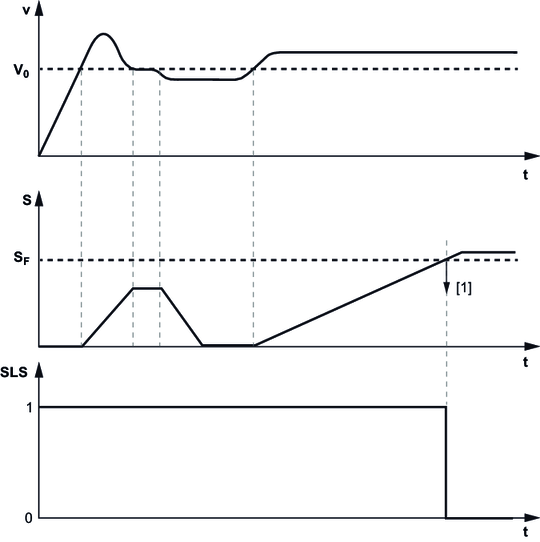
[1] | Reacción |
Un accionamiento supera el umbral "v0" parametrizado en la función parcial de seguridad SLS. Al superarse el umbral "v0", se integra la velocidad por encima del umbral (S). Si la velocidad actual cambia de nuevo a un valor inferior al umbral parametrizado "v0", la integral también vuelve a bajar a "0". Más adelante, la velocidad vuelve a aumentar y se mantiene por encima del umbral parametrizado "v0". En consecuencia, la integral también vuelve a aumentar y desencadena la reacción correspondiente [1] cuando se supera el valor del filtro (SF) (aquí: función parcial de seguridad SLS). El estado cambia de "1" a "0". La evolución del valor de error se puede registrar en Scope.
- Filtro de velocidad SLS 8706.25 (Offset 0 – 3)
- Filtro de velocidad SSM 8706.31 (Offset 0 – 1)
- Filtro de velocidad SSR 8706.56 (Offset 0 – 1)
Para la primera puesta en marcha de los filtros de velocidad, resulta de utilidad registrar la evolución de la velocidad a través de Scope. Este valor máximo puede utilizarse a modo de primera aproximación como valor de filtro para el filtro de velocidad, teniendo en cuenta las posibles tolerancias.
