Sistema de 2 encoders
Ao usar o encoder 1 e o encoder 2, os valores de processo "posição", "velocidade" e "aceleração" são formados a partir desses dois encoders por razões técnicas de segurança.
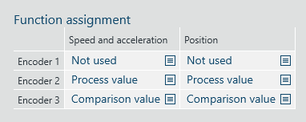
A atribuição de funções "valor de processo" deve ser atribuída ao encoder que fornece o sinal de melhor qualidade para este valor.
Deste modo, a seleção do valor de processo para a velocidade e aceleração é normalmente atribuída aos encoders 1 - o encoder do motor - e ao 2.º encoder, normalmente um encoder linear SSI, é atribuída a seleção do valor de comparação.
Para o valor de processo "Posição", a seleção normalmente é invertida, pois o encoder linear fornece melhores informações de posição.
Se ambos os encoders fornecerem valores qualitativamente comparáveis, ambos podem ser definidos para valor de processo.
Em aplicações com muito escorregamento (por ex., sistema de armazenagem/coleta) ou em movimentos em que a posição aplicativa não seja linear em relação à posição do motor (por ex., mesa pantográfica) e a posição absoluta tenha que ser monitorada, podem ser usados 2 encoders lineares além do encoder do motor.
Daqui advêm as seguintes opções de configuração:
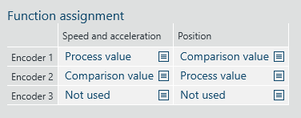
- Todos os 3 encoders são usados, sendo que apenas 2 encoders são considerados por valor de processo.
- O encoder do motor (encoder 1) e um encoder linear (encoder 2 ou encoder 3) são normalmente utilizados para gerar os valores de processo "velocidade" e "aceleração". Os dois encoders lineares (encoder 2 e encoder 3) são usados para obter o valor de processo "posição".
INFORMAÇÃO
A combinação do encoder HTL (encoder 1) e seno/cosseno (encoder 2) não é permitida.
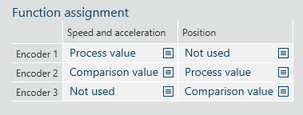

- Nesta constelação existe a opção de gerar não só a posição, mas também a velocidade e aceleração dos dois encoders lineares (encoder 2 e encoder 3). O encoder do motor também pode ser dispensado neste caso. Se nenhum teste de frenagem SBT for usado, também pode ser usado um tipo de encoder que não é compatível com o opcional de segurança. O teste de freio SBT usa apenas o encoder 1 e requer um encoder do motor seguro.