Avaliação do encoder do opcional de segurança CSA31A
O opcional de segurança CSA31A suporta conceitos de 1 e 2 encoders que podem ser parametrizados independentemente um do outro para posição e velocidade/aceleração.
Em um conceito de 1 encoder, o encoder deve atender aos requisitos de segurança exigidos de acordo com EN ISO 13849‑1 e EN 62061 e ser aprovado para o uso de funções do componente de segurança dependentes de velocidade/posição.
O seguinte se aplica à atribuição do encoder:
- O encoder 1 é sempre o encoder do motor que está conectado ao X15 na unidade.
- O encoder 2 é o encoder SSI usado para controle de posicionamento. Alternativamente, também pode ser usado um encoder sen/cos.
- O encoder 3 é um encoder SSI que somente é avaliado pelo opcional de segurança CSA31A.
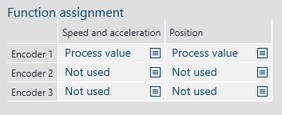
No Assist CS.. a função do encoder é atribuída na caixa de diálogo "Função do encoder". Em um conceito de 1 encoder, a atribuição de funções para este encoder deve ser parametrizada para "valor de processo".
A figura a seguir mostra o ajuste de um encoder do motor seguro.
Em um conceito de 1 encoder, o encoder deve ser referenciado novamente após a ativação se a posição segura for usada.
Em um conceito de 2 encoders, um sistema de encoder seguro é formado por 2 encoders. O usuário é responsável pela seleção dos componentes e do cumprimento dos requisitos da norma relevante, por ex., EN ISO 13489. Alternativamente, pode ser usado um encoder SSI duplo seguro que atende aos requisitos de segurança exigidos de acordo com EN ISO 13849-1 e EN 62061 e é aprovado para o uso de funções do componente de segurança dependentes da velocidade/posição.
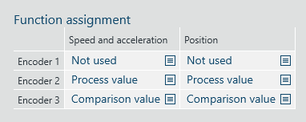
Aqui o encoder 2 e o encoder 3 devem ser ajustados para "Valor do processo" (ver a figura a seguir).
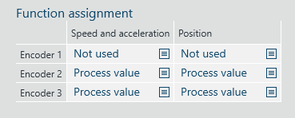
Se ambos os encoders forem parametrizados para "valor de processo", primeiro verifica-se se ambos os valores do encoder estão dentro da tolerância configurada para posição e velocidade. Em seguida, o valor médio é formado a partir de ambos os valores do encoder e usado para monitoramento nas funções do componente de segurança.
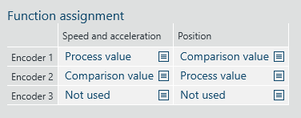
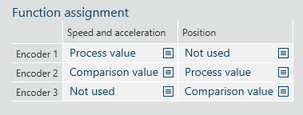
Se um dos encoders for parametrizado para "valor de processo" e o 2.º encoder para "valor de comparação", a diferença de ambos os valores do encoder deve estar dentro da tolerância de posição e velocidade. O valor de processo é usado para monitoração nas funções do componente de segurança.
Para o tempo de resposta na combinação de valor de processo/valor de comparação, considerar os respectivos valores de tolerância para posição e velocidade, bem como a metade dos valores de tolerância ao calcular o valor médio.