Traitement codeur de l'option de sécurité CSA31A
L'option de sécurité CSA31A est compatible avec les concepts à un et deux codeur(s) qui peuvent être paramétrés indépendamment l'un de l'autre pour la position et la vitesse ou l'accélération.
Dans le cas d'un concept à un codeur, le codeur doit satisfaire aux exigences de sécurité requises conformément aux normes EN ISO 13849‑1 et EN 62061 et être homologué pour l'utilisation de sous-fonctions de sécurité dépendant de la vitesse et de la position.
Ce qui suit s'applique à l'affectation codeur.
- Le codeur 1 est toujours le codeur moteur raccordé à l'interface X15 de l'appareil.
- Le codeur 2 est le codeur SSI utilisé pour la régulation de position. Il est également possible d'utiliser un codeur sin/cos.
- Le codeur 3 est un codeur SSI exclusivement traité par l'option de sécurité CSA31A.
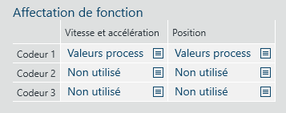
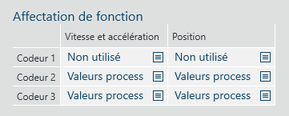
La fonction du codeur est affectée dans l'outil "Assist CS.." dans la fenêtre "Fonction codeur". Dans le cas d'un concept à un codeur, paramétrer, pour ce dernier, l'affectation des fonctions sur "Valeur process".
L'illustration suivante montre le réglage d'un codeur moteur de sécurité.
Dans le cas d'un concept à un codeur, refaire la prise de référence du codeur après la mise sous tension si la position de sécurité est utilisée.
Dans le cas d'un concept à deux codeurs, un système codeur complet est constitué à partir de deux codeurs. L'utilisateur est responsable de la sélection des composants et du respect des exigences de la norme concernée, p. ex. la norme EN ISO 13489. En alternative, un codeur SSI double de sécurité répondant aux exigences de sécurité requises conformément aux normes EN ISO 13849‑1 et EN 62061 peut être utilisé et homologué pour l'utilisation de sous-fonctions de sécurité dépendant de la vitesse et de la position.
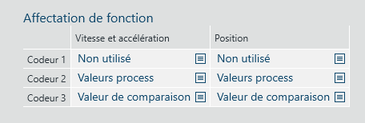
Dans ce cas, régler les codeurs 2 et 3 sur "Valeurs process" (voir illustration suivante).
Si les deux codeurs sont paramétrés sur "Valeurs process", il est tout d'abord vérifié si les deux valeurs codeur se trouvent dans les limites de la plage de tolérance configurée pour la position et la vitesse. La valeur moyenne est ensuite calculée à partir des deux valeurs codeur et utilisée dans les sous-fonctions de sécurité à des fins de surveillance.
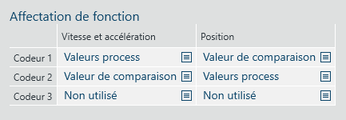
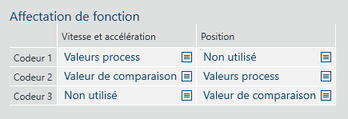
Si l'un des codeurs est paramétré sur "Valeurs process" et le deuxième sur "Valeur de comparaison", la différence entre les deux valeurs de codeur doit se trouver dans la tolérance pour la position et la vitesse. La valeur process est utilisée dans les sous-fonctions de sécurité aux fins de surveillance.
Pour le temps de réaction dans la combinaison valeur process - valeur de comparaison, prendre en compte les valeurs de tolérance correspondantes pour la position et la vitesse. Pour calculer la valeur moyenne, pendre en compte respectivement la moitié des valeurs de tolérance.