Evaluación de encoder de la opción de seguridad CSA31A
La opción de seguridad CSA31A soporta conceptos de 1 y 2 encoders que se pueden parametrizar independientemente el uno del otro para posición y velocidad/aceleración.
En un concepto de 1 encoder, el encoder debe cumplir los requisitos de seguridad exigidos según EN ISO 13849‑1 y EN 62061 y estar autorizado para el uso de funciones parciales de seguridad dependientes de la velocidad/posición.
Para la asignación de encoder tiene validez lo siguiente:
- El encoder 1 es siempre el encoder del motor que se conecta a X15 en la unidad.
- El encoder 2 es el encoder SSI, que se utiliza para la regulación de posición. Como alternativa, también se puede utilizar un encoder sen/cos.
- El encoder 3 es un encoder SSI que es evaluado únicamente por la opción de seguridad CSA31A.
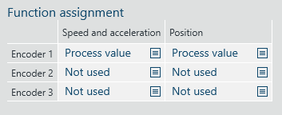
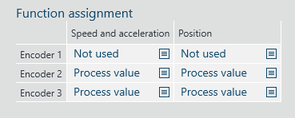
En el diálogo "Función de encoder" de la Assist CS.. se asigna la función del encoder. En un concepto de 1 encoder, la asignación de función para este encoder se debe parametrizar a "Valor de proceso".
La siguiente imagen muestra el ajuste para un encoder de motor seguro.
En un concepto de 1 encoder, el encoder se debe referenciar de nuevo después de conectar cuando se utiliza la posición segura.
En un concepto de 2 encoders se forma un sistema de encoder seguro a partir de 2 encoders. El usuario es responsable de la selección de los componentes y de la observación de los requisitos de la norma relevante, p. ej., EN ISO 13489. Como alternativa, se puede utilizar un encoder SSI doble seguro que cumpla los requisitos de seguridad exigidos según EN ISO 13849‑1 y EN 62061 y que esté autorizado para el uso de funciones parciales de seguridad dependientes de la velocidad/posición.
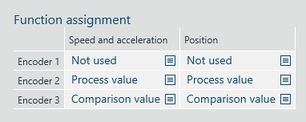
En tal caso, el encoder 2 y el encoder 3 se deben ajustar a "Valor de proceso" (véase la siguiente ilustración).
Cuando ambos encoders se han parametrizado a "Valor de proceso", primero se comprueba si ambos valores de encoder quedan dentro de la tolerancia configurada para posición y velocidad. Seguidamente, a partir de ambos valores de encoder se forma el valor medio, que se utiliza para la vigilancia en las funciones parciales de seguridad.
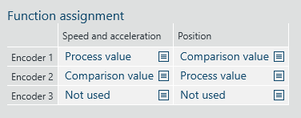
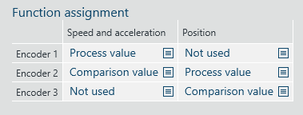
Si uno de los encoders se parametriza a "Valor de proceso" y el 2° encoder a "Valor de comparación", la diferencia entre ambos valores de encoder debe quedar dentro de la tolerancia para posición y velocidad. El valor de proceso se utiliza para la vigilancia en las funciones parciales de seguridad.
En el tiempo de respuesta en la combinación Valor de proceso/Valor de comparación", tenga en cuenta los valores de tolerancia correspondientes para posición y velocidad, así como para la formación del valor medio la mitad de los valores de tolerancia en cada caso.