Geberauswertung der Sicherheitsoption CSA31A
Die Sicherheitsoption CSA31A unterstützt 1- und 2-Geberkonzepte, die für Position und Geschwindigkeit/Beschleunigung unabhängig voneinander parametriert werden können.
Bei einem 1-Geberkonzept muss der Geber den geforderten Sicherheitsanforderungen gemäß EN ISO 13849‑1 und EN 62061 entsprechen und für die Verwendung geschwindigkeits-/positionsabhängiger Sicherheits‑Teilfunktionen zugelassen sein.
Für die Geberzuordnung gilt:
- Geber 1 ist immer der Motorgeber, der am Gerät an X15 angeschlossen wird.
- Geber 2 ist der SSI-Geber, der zur Lageregelung verwendet wird. Alternativ kann auch ein sin/cos-Geber eingesetzt werden.
- Geber 3 ist ein SSI-Geber, der ausschließlich von der Sicherheitsoption CSA31A ausgewertet wird.
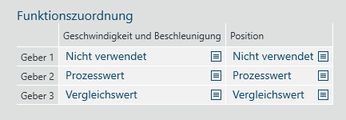
Im Assist CS.. wird im Dialog "Geberfunktion" die Funktion des Gebers zugeordnet. Bei einem 1-Geberkonzept ist die Funktionszuordnung für diesen Geber auf "Prozesswert" zu parametrieren.
Das folgende Bild zeigt die Einstellung für einen sicheren Motorgeber.

Bei einem 1-Geberkonzept ist nach dem Einschalten der Geber neu zu referenzieren, wenn die sichere Position verwendet wird.
Bei einem 2-Geberkonzept wird aus 2 Gebern ein sicheres Gebersystem gebildet. Der Anwender ist verantwortlich für die Auswahl der Komponenten und die Einhaltung der Anforderungen der relevanten Norm z. B. EN ISO 13489. Alternativ kann ein sicherer Doppel SSI-Geber eingesetzt werden, der den geforderten Sicherheitsanforderungen gemäß EN ISO 13849‑1 und EN 62061 entspricht und für die Verwendung geschwindigkeits-/positionsabhängiger Sicherheits-Teilfunktionen zugelassen ist.
Hier sind der Geber 2 und Geber 3 auf "Prozesswert" einzustellen (siehe folgendes Bild).
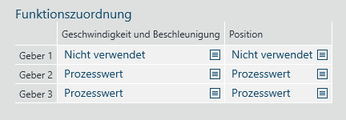
Wenn beide Geber auf "Prozesswert" parametriert werden, wird zuerst geprüft, ob beide Geberwerte innerhalb der konfigurierten Toleranz für Position und Geschwindigkeit liegen. Anschließend wird aus beiden Geberwerten der Mittelwert gebildet und in den Sicherheits‑Teilfunktionen zur Überwachung verwendet.
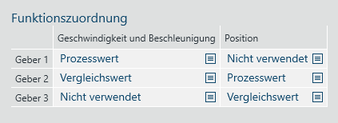
Wenn einer der Geber auf "Prozesswert" und der 2. Geber auf "Vergleichswert" parametriert wird, muss die Differenz bei beiden Geberwerte innerhalb der Toleranz für Position und Geschwindigkeit liegen. Der Prozesswert wird in den Sicherheits-Teilfunktionen zur Überwachung verwendet.
Berücksichtigen Sie bei der Reaktionszeit in der Kombination Prozesswert/Vergleichswert die jeweiligen Toleranzwerte für Position und Geschwindigkeit sowie bei der Mittelwertbildung jeweils die Hälfte der Toleranzwerte.