MOVIKIT®-Softwaremodul in Betrieb nehmen
Für dieses Beispiel wird das Softwaremodul MOVIKIT® Velocity aus der Kategorie "SingleAxis" verwendet. MOVIKIT® Velocity stellt eine standardisierte Funktionalität und Schnittstelle für einen typischen drehzahlgeregelten Antrieb zur Verfügung.
HINWEIS
Detailliertere Informationen zu den Softwaremodulen MOVIKIT® finden Sie in den dazugehörigen Dokumentationen.
Gehen Sie folgendermaßen vor:
- Sie haben die Geräte des Automatisierungsbaukastens MOVI‑C® in einem MOVISUITE®‑Projekt integriert und den Antriebsstrang konfiguriert.
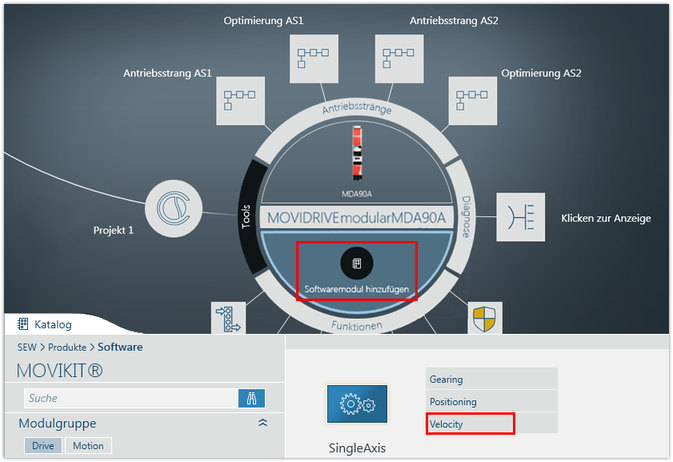
- Klicken Sie im Kreisansicht des Umrichters auf [Softwaremodul hinzufügen] und wählen Sie aus dem Katalog in der Kategorie "SingleAxis" den Eintrag "Velocity". Übernehmen Sie die vorgeschlagene Version des Softwaremoduls.
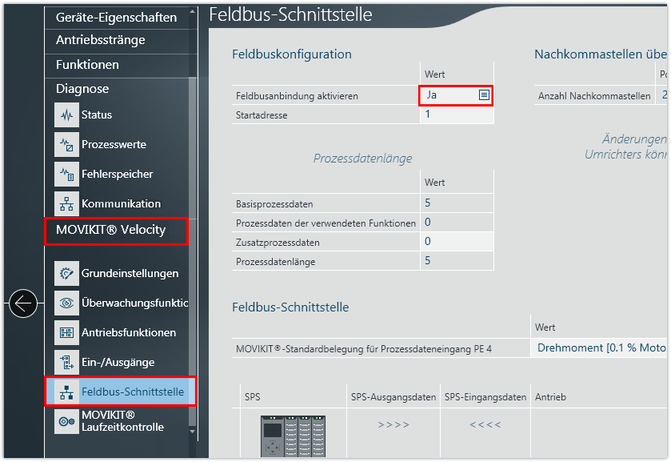
- Öffnen Sie die Konfiguration des Umrichters und aktivieren Sie in der Parametergruppe [MOVIKIT® Velocity] > [Feldbus-Schnittstelle] die Feldbusanbindung des Softwaremoduls.
- Konfigurieren Sie die Startadresse und die Prozessdatenlänge.
- Die Startadresse des ersten Umrichters ist 1. Wenn Sie mehrere Umrichter einem MOVI-C®-CONTROLLER untergeordnet haben, verschiebt sich die Startadresse der folgenden Umrichter um die Gesamtlänge der vorangehenden Prozessdaten.
- Die unterschiedlichen MOVIKIT®-Softwaremodule haben unterschiedliche Prozessdatenlängen. Beispielsweise hat MOVIKIT® Velocity 5 Prozessdatenwörter und MOVIKIT® Positioning 8 Prozessdatenwörter.
- Das folgende Beispiel zeigt die Abhängigkeit der Startadressen von der Anzahl der Prozessdatenwörter in einer Gerätetopologie mit 3 untergeordneten Umrichter:
Gerät | Zugeordnetes Softwaremodul | Startadresse |
|---|---|---|
Umrichter 1 | MOVIKIT® Velocity (5 PD) | 1 |
Umrichter 2 | MOVIKIT® Positioning (8 PD) | 6 (= 1 + 5 vom Umrichter 1) |
Umrichter 3 | MOVIKIT® Velocitiy (5 PD) | 14 (= 1 + 5 vom Umrichter 1 + 8 vom Umrichter 2) |
HINWEIS
