Colocar em operação o módulo de software MOVIKIT®
Para este exemplo é usado o módulo de software MOVIKIT® Velocity da categoria "SingleAxis". O MOVIKIT® Velocity fornece uma funcionalidade e interface padronizadas para um acionamento com rotação controlada típico.
INFORMAÇÃO
É possível encontrar informações mais detalhadas sobre os módulos do software MOVIKIT® na documentação associada.
Proceda da seguinte forma:
- As unidades do kit de automação MOVI‑C® foram integradas em um projeto MOVISUITE® e o conjunto de acionamento foi configurado.
- Na visualização do circuito do conversor, clique em [Adicionar módulo de software] e selecionar a entrada "Velocity" no catálogo na categoria "SingleAxis". Aplicar a versão proposta do módulo de software.
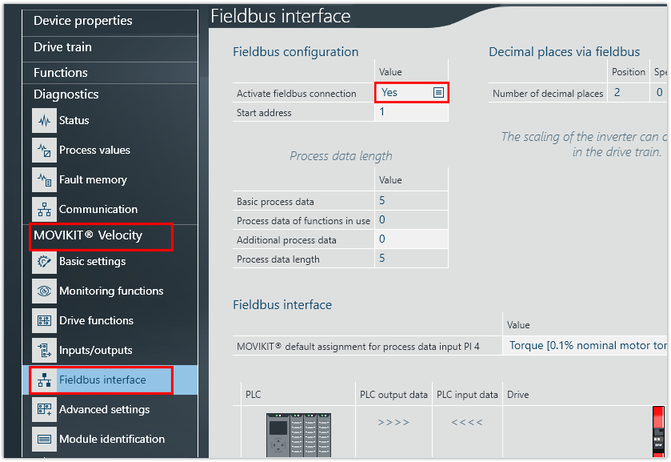
- Abrir a configuração do conversor e ativar a conexão fieldbus do módulo de software no grupo de parâmetros [MOVIKIT® Velocity] > [Interface fieldbus].
- Configurar o endereço de partida e o comprimento dos dados de processo.
- O endereço de partida do primeiro conversor é 1. Se vários conversores forem subordinados a um MOVI-C®-CONTROLLER, o endereço de partida dos conversores a seguir é alterado pelo comprimento total dos dados do processo anteriores.
- Os distintos módulos de software MOVIKIT® possuem diferentes comprimento dos dados de processo. Por exemplo, o MOVIKIT® Velocity 5 palavras de dados de processo e MOVIKIT® Positioning 8 palavras de dados de processo.
- O exemplo a seguir mostra a dependência dos endereços de partida no número de palavras de dados de processo em uma topologia da unidade com 3 conversores subordinados:

Unidade | Módulo de software associado | Endereço de partida |
|---|---|---|
Conversor 1 | MOVIKIT® Velocity (5 PD) | 1 |
Conversor 2 | MOVIKIT® Positioning (8 PD) | 6 (= 1 + 5 do conversor 1) |
Conversor 3 | MOVIKIT® Velocitiy (5 PD) | 14 (= 1 + 5 do conversor 1 + 8 do conversor 2) |
INFORMAÇÃO
