Rangos de posición v
Con la función "Rangos de posición v" se puede adaptar el perfil de desplazamiento mediante la especificación de una ventana de posición, así como una velocidad, una deceleración y una aceleración adecuadas.
Los parámetros de desplazamiento pueden ajustarse individualmente para cada rango de posición v. Así es posible realizar, por ejemplo, aplicaciones con diferentes parámetros dinámicos para desplazamientos a toda marcha y en vacío.
Ejemplo de aplicación
Recepción suave de una carga, como ocurre, por ejemplo, al elevar un palet con el dispositivo tomacargas. La activación de esta función mediante la palabra de control de aplicación debe ocurrir durante una parada. Si se produce una activación durante la marcha, en primer lugar se decelera a la velocidad "0" mediante FCB 26 antes de recorrer el desplazamiento del perfil de desplazamiento. El perfil de desplazamiento solo se recorre si el rango de posición v se encuentra de camino a la posición de destino o la posición de destino se encuentra dentro del rango de posición v.
Aviso: La activación de esta función solo es posible en el modo de funcionamiento 400 (Posicionamiento absoluto) en ejes lineales. Si se selecciona una posición de leva v con ventana de leva v no válida, el motor se detiene mediante FCB 26. Para la determinación de rangos de posición v debe observarse la siguiente regla:
Límite izquierdo v ≤ límite derecho v
Si se selecciona un rango de posición v no válido, este se ignora, llevándose a cabo un proceso de posicionamiento normal. La palabra de estado de aplicación devuelve un proceso de desplazamiento de leva v activo.
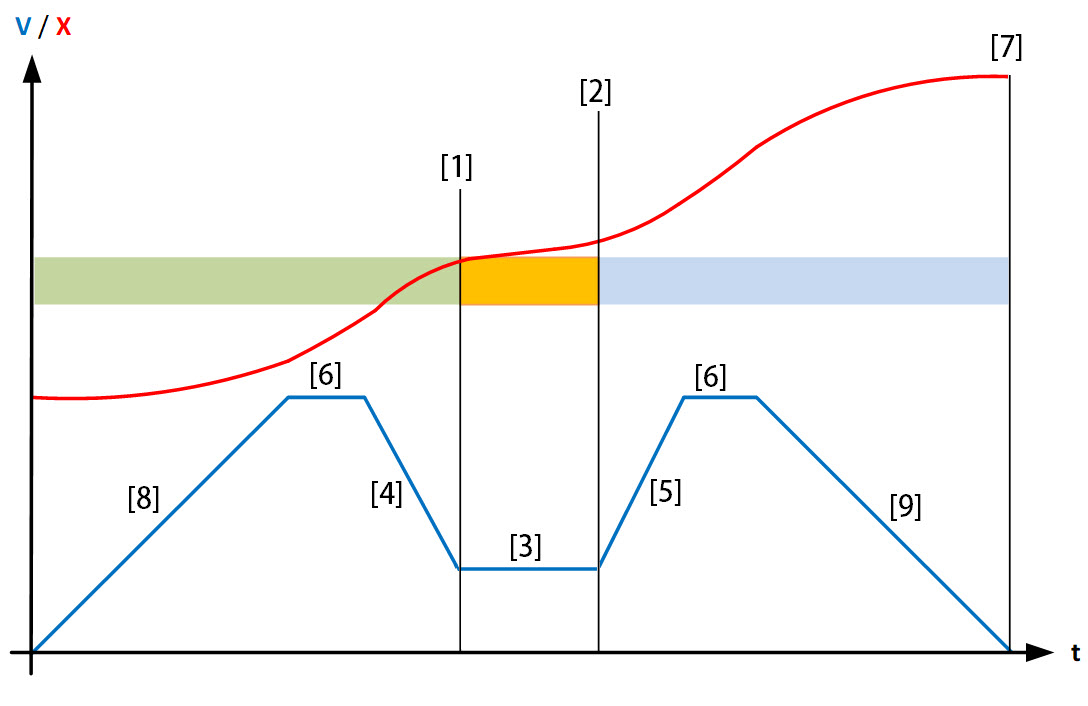
1 | Límite izquierdo |
2 | Límite derecho |
3 | Velocidad |
4 | Deceleración |
5 | Aceleración |
6 | Consigna fija: velocidad de tabla |
7 | Consigna fija: posición de tabla |
8 | Consigna fija: aceleración de tabla |
9 | Consigna fija: deceleración de tabla |
